Završni rad br. 38
Robert Sajko
Implementacija
|
Programski jezik odabran za implementaciju algoritma predizračunatog
prijenosa zračenja jest C++, zbog svoje moćne objektne paradigme i efikasnosti.
Grafičko programsko sučelje korišteno pri izradi aplikacije jest OpenGL, koji
je odabran prvenstveno zbog jednostavnosti uporabe. Zahtjevi nad programskom
potporom su sljedeći: mogućnost rada s bilo kojim virtualnim okruženjem
priloženim u odgovarajućem formatu; simulacija tog virtualnog okruženja u
stvarnom vremenu s naprednim osvjetljenjem, koje pokazuje (barem neke) globalne
učinke osvjetljenja koji se ne mogu simulirati postojećim lokalnim modelima. Prvi
zahtjev je ispunjen tako da se virtualno okuženje interpretira kao skup
objekata koji su raspoređeni u prostoru na neki predodređeni način, i koji
posjeduju predodređene karakteristike. U toj interpretaciji, virtualno
okruženje možemo nazvati scenom, a
komponente virtualnog okruženja objektima
scene. S tim u vidu, za potrebe demonstracije programske potpore,
konstruirani su jednostavni 3D objekti korištenjem Autodesk Maya 2008 alata, i
zatim eksportirani u jednostavni i općeprihvaćeni .obj format. U svrhu
povezivanja tih individualnih objekata u cjelovitu scenu, potrebna je dodatna
datoteka koja služi kao opisnik scene. Kao takva, njen je format vrlo jednostavan
– riječ je tek o popisu objekata koji se pojavljuju na sceni. Budući da se u Maya alatu objekti mogu već prije eksportiranja translatirati, rotirati i
postaviti na scenu u odgovarajuću poziciju, format opisa scene ne treba
sadržavati takve podatke. Jedino što je potrebno jest označiti željenu
teksturu. Dakle, opis scene se sastoji od stavaka sljedećeg oblika: "NazivDatotekeObjekta.obj"
"NazivDatotekeTeksture.tga" Navodnici su potrebni da se omoguće praznine u nazivu datoteka. Sljedeći i
glavni zahtjev se može ispuniti korištenjem predizračunatog prijenosa zračenja,
što je trenutno ponajbolji izbor za interaktivnu simulaciju globalnog
osvjetljenja. Nakon definiranja svih zahtjeva i općih smjernica njihovog
ispunjenja, moguće je dizajnirati arhitekturu programske potpore. Prvi korak
dizajna jest razlučivanje odgovornosti, i njihovo pridjeljivanje paketima.
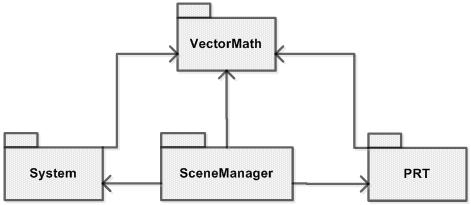
Shodno tome, možemo razlikovati četiri glavna paketa, kako to prikazuje
sljedeći dijagram:
Temeljni paket jest System, koji je
odgovoran za sve sistemske operacije poput stvaranja prozora za iscrtavanje,
rukovanje ulaznim jedinicama itd. Zatim, paket SceneManager sadrži i upravlja
svim podacima koji određuju scenu. Između ostalog, razredi iz tog paketa će biti
zaslužni za učitavanje .obj datoteka. Najvažniji paket jest PRT, koji sadrži svu funkcionalnost potrebnu za
provođenje algoritma predizračunatog zračenja, dakle i predprocesiranje scene,
i samo iscrtavanje. Na kraju, pomoćni paket VectorMath sačinjavaju razredi za rad s pravokutnim i
sfernim vektorima. Sada slijedi detaljniji pregled svakog od ovih paketa, sa
UML dijagramima razreda, te objašnjenjima.
System
Ovaj paket se sastoji od dvaju razreda, CSystem i CSystem::CCamera. Prvi razred enkapsulira računalni sustav i
njegove ulazne jedinice. Stvaranje prozora za iscrtavanje se vrši direktnim
pozivima Windows API-ja, dok se inicijalizacija crtaćeg konteksta ostvaruje
OpenGL naredbama. Grafička kartica, predstavljena nekim programskim sučeljem
poput OpneGL-a, se također može shvatiti kao jedinica unutar sustava. Razlikuje
se faza inicijalizacije (stvaranje crtaćeg konteksta), faza aktivnog rada
(opetovano iscrtavanje scene, određeni broj puta u sekundi), te faza
deinicijalizacije i prekida rada (otpuštanje crtaćeg konteksta, oslobađanje
memorije). Iz tog razloga, kao što se vidi na gornjem dijagramu, i funkcije
upravljanja iscrtavanjem su podijeljene na te faze. Komunikacija s ulaznim
jedinicama se ostvaruje pomoću DirectInput tehnologije, što je dio
Microsoftovog DirectX skupa tehnologija. Reaktivnost aplikacije na ulazne
podražaje (pritisci tipaka, pomaci miša) je ostvarena korištenjem paradigme
vođene događajima (event driven paradigm).
Naime, pojedine korisničke akcije su shvaćene kao događaji, te sustav detektira
i identificira različite događaje korištenjem nekog sklopovskog sučelja niže
razine (konkretno, DirectInput-a). Zatim, ti se događaji propagiraju kroz
sustav posredstvom raspačivača (što je ovdje CSystem) tako da se pozivaju odgovarajuće funkcije
rukovoditelji (event handlers). U
općenitom slučaju, bilo koji objekt u aplikaciji može registrirati svoje
rukovoditelje kod nekog objekta raspačivača, no u našem slučaju jedini
raspačivač jest razred CSystem, a jedini
rukovoditelj CSystem::CCamera (doduše, radi brzine izvođenja, provedena je optimizacija tako da se
izbjegne dvostruko indirektni poziv, pa je tehnički gledano CSystem i raspačivač, i rukovoditelj). Kako se može
naslutiti, razred CSystem::CCamera jest apstrakcija koncepta virtualne kamere, i sadrži podatke o položaju
očišta (točka u kojoj se kamera nalazi), gledišta (točka fokusa kamere, odnosno
„smjer gledanja“), te takozvani vektor prema gore, koji kazuje koji smjer je za
kameru „gore“. Dakle, pritiscima tipaka i pomacima miša, moguće je pomicati
pogled bilo gdje u sceni. Osim ove osnovne interaktivnosti, dozvoljeno je
pomicati i točku izvora svjetlosti, i to tako da se ona rotira oko ishodišta za
bilo koja dva kuta (θ, φ), pri čemu možemo reći da (θ, φ) zapravo predstavljaju sferne koordinate izvora svjetlosti.
Konkretna izvedba rotacije projicirane funkcije upadnog svjetla je objašnjena u
teorijskom izlaganju algoritma predizračunatog prijenosa zračenja, a
implementirana je u CPRT razredu,
koji je objašnjen kasnije u ovom tekstu. U ovom trenutku valja spomenuti da
aplikacija podržava i klasično osvjetljenje Blinn-Phong lokalnim modelom,
sklopovski dostupnim putem OpenGL-a. Budući da je podržano više od jednog
istovremenog izvora svjetla, tipkama 1-8 se bira trenutno aktivno svjetlo
(dakle, ono na koje se rotacija odnosi). Radi sklopovskog ograničenja na
maksimalno osam istovremenih izvora svjetla, aplikacija ne podržava više od tog
broja aktivnih svjetala, iako sam broj svjetala tek neznatno utječe na
performanse iscrtavanja algoritmom PRT. Također, registriraju se i neke
kontrole za olakšavanje testiranja programa. Sve navedene kontrole su pregledno
dane sljedećom tablicom: Tablica 1. Kontrole programa.
SceneManager
Sljedeći bitan skup razreda su CScene i CObject. Ova dva razreda redom predstavljaju enkapsulacije
scene, te objekata scene. Iz tog razloga, aplikacija u pravilu treba
instancirati samo jedan objekt tipa CScene. Konstruktor tog razreda automatski učitava
zadanu ulaznu datoteku s opisom scene, te stvara potreban broj objekata, koje
pohranjuje u internom spremniku. Sam postupak parsiranja .obj datoteka se
delegira na novostvorene CObject objekte.
Pojedini objekt scene je definiran svojim topološkim i geometrijskim podacima.
Geometrijski podaci su jednostavno skup točaka koji definiraju poligone objekta,
najčešće trokute, dok su topološki podaci logičke prirode. Naime, oni govore na
koji način se prethodno definirane točke interpretiraju, odnosno, kojim
redosljedom tvore poligone. Upravo ovakav pristup se koristi u .obj formatu,
zato što omogućava da se vrhovi poligona zapišu samo jedanput, a zatim po
potrebi dijele između susjednih poligona, čime se ostvaruje značajna ušteda na
memoriji. Međutim, radi jednostavnosti kasnije obrade, vrhovi i poligoni se u CObject klasi ne pohranjuju odvojeno, već se točke
jednostavno nižu onim redosljedom kojim tvore poligone, što znači da se većina
njih ponavlja, i do nekoliko puta. Pojedini vrh je predstavljen strukturom CObject::SVertex, koja osim pozicije točke u prostoru pohranjuje i
neke druge podatke vezane uz taj vrh, a to su koordinate teksture, boja, te
koeficijenti projekcije funkcije prijenosa svjetlosti u sferne harmonike, u toj
konkretnoj točki. Broj tih koeficijenata je limitiran na 16, budući da se
pokazalo da je već i tako malen broj sasvim dovoljan za kvalitetne rezultate.
Po potrebi, ovo se može i promijeniti, budući da nema nikakvog utjecaja na
izvođenje samog algoritma (osim produljenja trajanja). Kako se može
primijetiti, struktura za pohranu vrhova sadrži dva polja za pohranu boje.
Razlog tomu je taj, što aplikacija podržava i klasično, lokalno osvjetljenje, i
PRT osvjetljenje. Budući da je krajnji rezultat PRT algoritma boja pojedinog
vrha, tu boju je potrebno pohraniti. No, boja utječe i na OpenGL-ov ugrađeni
model osvjetljenja, pa je potrebno sačuvati bijelu boju za svaki vrh, i po
potrebi alternirati između njih. Sam izvor svjetla je enkapsuliran CScene::SLight strukturom, koja pohranjuje sferne koordinate
izvora, koeficijente izvorne projekcije funkcije osvjetljenja tog izvora, te
rotirane koeficijente projekcije, koji su dobiveni rotacijom izvornih
koeficijenata za kutove koji odgovaraju trenutnim sfernim koordinatama izvora. Izvorne
koeficijente je potrebno sačuvati zato jer postupak rotacije opisan u
prethodnom teorijskom izlaganju pretpostavlja apsolutnu rotaciju, a ne
relativnu. Budući da je tokom izvršavanja aplikacije moguće tek dobivati
relativne pomake između pojedinih iscrtavanja scene, ti relativni pomaci se
moraju zbrajati. Zatim, izvorni koeficijenti projekcije se rotiraju za te zbrojene,
apsolutne kutove.
PRT
Jezgra cijele aplikacije jest upravo razred CPRT. Naime, ovaj razred sadrži svu funkcionalnost
potrebnu za provedbu algoritma predizračunatog zračenja. Glavne funkcije, koje
ujedno čine javno sučelje razreda, su sljedeće: void computeTransferFunctions( CScene& Scene, fpProgressCallback ProgressCallback, bool FastMode ) Ulazni argumenti:
Ova funkcija je zaslužna za
predprocesiranje scene. Iz tog razloga, potrebno je prije njenog pozivanja
imati izgrađen objekt scene. Sam postupak predprocesiranja može biti vrlo
dugotrajan, stoga se omogućava objavljivanje napretka. U tu svrhu,
upotrijebljen je mehanizam funkcije povratnog poziva (callback function). Naime, korisnik treba napisati vlastitu
funkciju odgovarajućeg prototipa, i predati pokazivač na tu funkciju kao
argument funkciji computeTransferFunctions. Tokom
predprocesiranja, funkcija čiji je pokazivač predan će povremeno biti pozivana,
točnije, prilikom svakih 1% obavljenog posla. Iz tog razloga, ovaj mehanizam se
naziva povratnim pozivom. Generalno govoreći, očekuje se da će ta povratno
pozivajuća funkcija obavještavati korisnika o napretku algoritma, primjerice,
osvježavanjem nekog elementa grafičkog sučelja aplikacije i/ili tekstualnim
ispisom. Upravo je to slučaj u ovoj aplikaciji, kako će biti objašnjeno
kasnije. Posljednji argument funkcije specificira način obrade scene. Naime,
kako je spomenuto u teorijskom izlaganju, funkcija prijenosa čija se projekcija
računa za svaki vrh može biti različitog oblika. Ona može uključivati samo
difuznu refleksiju, bez detekcije zaklonjenosti, ili se pomoću zrake sjene može
dodatno utvrditi i da li je trenutni vrh u sjeni. Ovaj drugi način je očito
sporiji, pa je za potrebe testiranja scene ili same aplikacije mnogo
praktičnije preskočiti taj korak i značajno ubrzati obradu scene. void computeLightFunctions( CScene& Scene ) Ulazni argumenti:
Ova funkcija također vrši projekciju u sferne harmonike, no ovaj put za
svjetla. Budući da je za funkciju izlaznog isijavanja izvora uzeta konstanta,
ovaj je postupak relativno jednostavan i brz. Geometrijske karakteristike scene
nisu bitne, no podaci o svjetlima jesu, pa je potrebna referenca na objekt
scene, koji sadrži podatke o svjetlima. static void
RotateSHCoefficients( int numBands, double* unrotatedCoeffs, double* rotatedCoeffs, double theta, double
phi ) Ulazni argumenti:
Izlazni argumenti:
Funkcija za rotiranje koeficijenata projekcije vrši prethodno opisan
postupak rotacije. Prvo se rekurzivnim postupkom generiraju matrice za rotaciju
oko Z i X osi, a zatim se one izmnože i time stvori konačna matrica rotacije.
Množenjem izvornih koeficijenata s tom matricom dobiju se rotirani
koeficijenti, koji se pohranjuju u spremnik čiji je pokazivač predan kao
argument funkciji. Ova funkcija je deklarirana kao statička, iz razloga da se
omogući njeno korištenje i bez instanciranja razreda kojemu pripada. Ostali članovi razreda CPRT, koji sačinjavaju njegov privatni dio, su određene pomoćne funkcije koje
nemaju svrhu same za sebe, već su potrebne za prethodne tri funkcije. U ovu
skupinu spadaju metode za generiranje uniformnih uzoraka sfere, konstruiranje
asociranih Legendre polinoma, evaluaciju funkcija sfernih harmonika u danoj
točki, generiranje matrica rotacije oko Z i X osi, i slično. Implementacije tih
metoda su direktno preuzete iz teorijskog izlaganja algoritma.
VectorMath
Posljednji, i najmanji paket se sastoji od dvaju razreda za olakšavanje
računanja s vektorima, zadanih sfernim ili kartezijevim koordinatama. Njihovo
javno sučelje jest identično, i uključuje često korištene operacije poput
rotacije oko proizvoljne osi, normalizacije, skaliranja, skalarnog množenja
itd. Zbog česte i raširene potrebe za vektorskom matematikom, ove operacije su
enkapsulirane u zasebnom paketu, kojeg koriste svi ostali paketi. * * * Dizajn paketa i razreda programskog rješenja predstavlja njegovu logičku
arhitekturu, čiji je pregled upravo dan. Fizički dizajn uključuje raspodjelu
aplikacije u izvršne module i podatke. Budući da implementirani algoritam jasno
razlikuje dvije odvojene faze – predprocesiranje i samo iscrtavanje – i
programska podrška je fizički dizajnirana kao dvije odvojene aplikacije. Prva
aplikacija se naziva SHBuilder, i služi za obradu scene i generiranje
koeficijenata projekcije funkcije prijenosa. Druga aplikacija, koja se naziva
SHDemo, učitava prethodno generirane koeficijente, i na temelju njih vrši
iscrtavanje scene u stvarnom vremenu. Pritom obje aplikacije koriste iste,
prethodno opisane pakete razreda. Jedina je razlika u tome što SHBuilder sadrži
grafičko korisničko sučelje, za lakšu interakciju s programom. Iz tog razloga,
umjesto paketa System, koristi se Microsoftova biblioteka MFC, koja omogućava
jednostavniju izgradnju Windows aplikacija s grafičkim korisničkim sučeljem. Sada
možemo na konkretnom primjeru pokazati korisnost prethodno objašnjenog
mehanizma povratnog poziva – kako predprocesiranje scene napreduje, tako se
osvježava ProgressBar kontrola
(horizontalni stupac, inicijalno prazan, koji progresivno postaje sve
ispunjeniji), te se ispisuje očekivano vrijeme trajanja obrade scene (na
temelju trajanja obrade dotad obrađenog dijela scene). Budući da vrijeme
procesiranja može biti dugotrajno (na Pentium IV 2.0 GHz računalu je trajalo
otprilike tri sata za demonstracijsku scenu), u prilogu ovom radu se nalazi
aplikacija s demonstracijskom scenom s već predizračunatim koeficijentima.
Rezultati implementacije su u skladu s očekivanjima. Iz testiranja na nekoliko
računala, osvjetljenje PRT algoritmom je tek oko 15%, do najviše 40% sporije
nego osvjetljenje dobiveno ugrađenim OpenGL modelom osvjetljenja (pogledati
donju tablicu). Valja imati na umu da je ovdje riječ o naivnoj implementaciji,
koja direktno slijedi teorijske rezultate bez ikakvih optimizacija. Prvi korak
koji bi svaka ozbiljna implementacija trebala poduzeti jest prebacivanje
izračuna boje pojedinog vrha na grafičku karticu. Iako je ta operacija vrlo
jednostavna, i sastoji se tek od 16 množenja i zbrajanja, takve operacije
grafičko sklopovlje izvršava mnogo brže nego glavni procesor. Također, budući
da će sve podatke o vrhovima pohranjivati i obrađivati grafička kartica, ne
gubi se vrijeme na komunikaciju glavnog procesora i grafičke kartice. Osim toga,
i postupak predprocesiranja scene se može barem djelomično implementirati nekim
jezikom sjenčanja, i time značajno ubrzati. Optimizirane implementacije PRT
algoritma bi zapravo lako mogle biti i brže
od lokalnih modela osvjetljenja, ukoliko uzmemo u obzir situacije s više od
jednog svjetla na sceni. Naime, konačna boja nekog vrha jest skalarni umnožak
vektora koeficijenata tog vrha, i konačnog vektora koeficijenata osvjetljenja. Taj
konačni vektor osvjetljenja se dobije kao zbroj vektora koeficijenata svih
izvora. Taj se zbroj može izračunati jedanput, a zatim, ukoliko dođe do
rotacije pojedinog svjetla, dovoljno je izračunati razliku u odnosu na
nerotirano svjetlo, i taj vektor razlike pribrojiti ukupnom zbroju. Drugim
riječima, kompleksnost izračuna boje danog vrha time postaje konstantna, uopće ne
oviseći o broju svjetala. S druge strane, kod lokalnih modela osvjetljenja, za
svako svjetlo se cjelokupan postupak računanja mora ponoviti. Sljedeća tablica
ilustrira performanse (izražene u broju iscrtanih slika u sekundi) ove
neoptimizirane implementacije, i dobro pokazuje da je upravo centralni procesor
usko grlo:
Promatrajući generirane slike, do izražaja dolazi činjenica da algoritam
računa boju po vrhu. Naime, prilikom
kreiranja konačne slike, u postupku rasterizacije se mora odrediti boja svakog
pojedinog slikovnog elementa. Budući da boju specificiramo po vrhovima,
slikovni elementi koji upadaju na područja između pojedinih vrhova, nakon projekcije
u prostor slike, imaju nedefiniranu boju. Jednostavno rješenje problema jest
linearna interpolacija boje između dva susjedna vrha. No, to znači da ukoliko
imamo nedostatan broj vrhova, diskretizacija će biti očita, budući da će
zamjetno velika područja slike biti obojana istom bojom. To također znači da
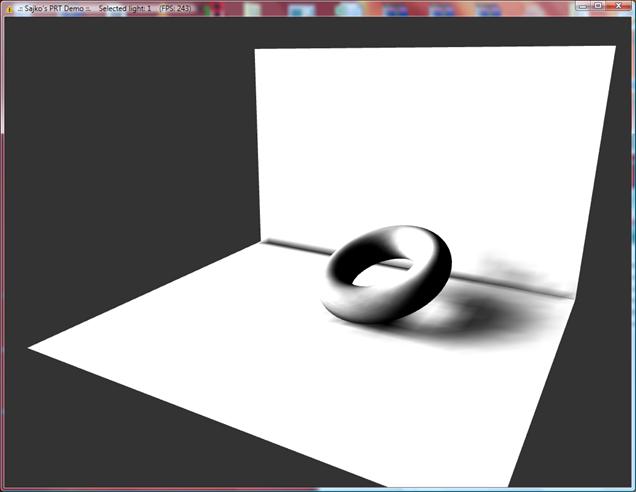
neće biti finih prijelaza osvjetljenja, već će biti vidljive grube razine. Primjer
daje slika 27, nastala isključivanjem tekstura (usporedbe radi, ta je slika
nastala u istovjetnim uvjetima kao slika 21).
Na sjeni koju baca torus, uočavaju se dvije razine – najtamnija, središnja
sjena, koja se naziva umbra, te okolna, svjetlija sjena koja se naziva
penumbra. Prijelaz između umbre i penumbre bi trebao biti gladak, no lako se
mogu uočiti diskretne razine osvjetljenja, budući da su pojedini vrhovi koji su
unutar umbre gotovo potpuno crni, no dijelovi poligona koji bi također trebali
biti unutar umbre su sivi, budući da je boja tih slikovnih elemenata dobivena
linearnom interpolacijom između vrha unutar umbre, i vrha unutar penumbre. Na
sjeni koju torus baca na samog sebe, takvi artefakti su mnogo teže uočljivi,
budući da se torus sastoji od 10800 jedinstvenih vrhova, dok se okolne plohe
sastoje od svega 2700 vrhova. Međutim, ukoliko usporedimo ovu sliku sa slikom
21, koja je ista ali s uključenim teksturama, navedeni artefakti više uopće nisu
vidljivi, budući da ih tekstura čini nezamjetnima. Također, današnje aplikacije
već barataju i s mnogo većim brojem vrhova, tako da ovo zasigurno više nije
problem. |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||