



Računalni model
3D modeliranje dizalice obavljeno je u programu Inivis AC3D.
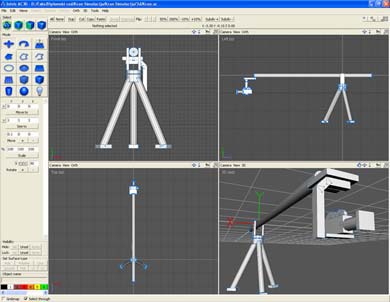
Slika 3.1. Modeliranje dizalice programom Inivis AC3D.
Računalni model je izrađen programskim jezikom C++ u kombinaciji s grafičkim standardom OpenGL.
Aplikacija učitava objekte rastavljene na pojedine dijelove (stalak, ruka, robotska glava, kamera), te sprema njihov prvotni položaj u matricu koju zovemo originalnom matricom.
Originalna matrica je važna zato jer uvijek čuva prvotnu informaciju o objektima, tako da nema inkrementalne pogreške koja bi mogla nastati zbog nepreciznosti brojeva s posmačnim zarezom, koje koristimo za izračunavanje trenutnih vrhova poligona, prilikom uzastopnih rotacija. Za svaku, pa i najmanju rotaciju, originalnu matricu kopiramo u radnu matricu, koju rotiramo, te ju nakon rotacije vizualno prikazujemo na zaslonu korištenjem OpenGL grafičkog standarda.
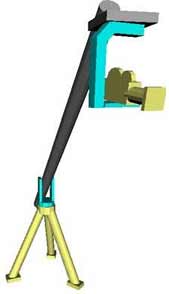
Slika 3.2. Prikaz računalnog modela dizalice.
Upravljanje računalnim modelom
Držeći srednju tipku miša, rotiramo očište.
Tipkama 3, i 4 približavamo i udaljavamo očište od objekta.
Pomicanjem računalnog miša držeći njegovu prvu tipku rotiramo ruku dizalice.
Pomicanjem računalnog miša držeći njegovu treću tipku rotiramo robotsku glavu za kameru.
Namjestimo se na jednu poziciju i stisnemo tipku 1 i tako postavimo prvi pravac na kojem leži ciljana točka.
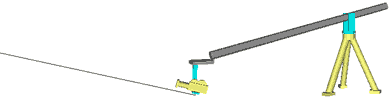
Slika 3.3. Odabir prvog pravca na kojemu leži ciljana točka.
Pomaknemo ruku dizalice na drugu poziciju, zarotiramo kameru, i stisnemo tipku 2, te tako odredimo drugi pravac na kojem leži ciljana točka.
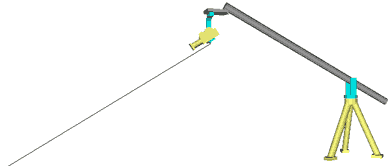
Slika 3.4. Odabir drugog pravca na kojemu leži ciljana točka.
Ako pomičemo ruku nakon što smo komandama za ciljanje odredili ciljanu točku, vidjeti ćemo da se kamera automatski zakreće prema zadanoj točci.
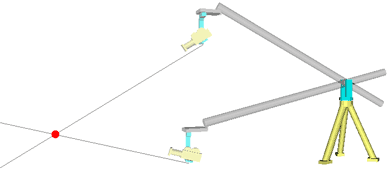
Slika 3.5. Ciljana točka prikazana je crvenim krugom na sjecištu dva pravca.