1. Uvod
Genetski algoritmi sve više dolaze
do izražaja kao učinkovite metode za rješavanje raznih klasa problema. Na
početku su to bili optimizacijski problemi, no kao što se vidi iz radova
predstavljenih u poglavlju dva područja primjene znatno su šira. Razlog tome
leži u prilagodljivosti genetskog algoritma problemu, što mu je i najveća
prednost, ali i najveća mana. Mana zbog toga, jer se za svaki tip problema mora
razviti genetski algoritam koji ga rješava ili se problem mora prilagoditi
nekom postojećem genetskom algoritmu.
Genetski algoritmi su
toliko napredovali da su u nekim primjenama postali i bolji od čovjeka. Jedan
dobar primjer za to je razvoj turbine za Boeing 777, gdje su genetski algoritmi
napravili i bolje rješenje i znatno su skratili vrijeme izrade proizvoda.
Kao što im samo ime
kaže svoje principe temelje na teoriji evolucije. Iz populacije jedinki, bolje
jednike opstaju i tako se kroz određeni broj generacija dolazi do sve boljeg
rješenja, tj. sve se više rješenje približava optimumu. Do toga se dolazi
korištenjem operatora križanja i mutacije. Operatori križanja su operatori koji
uzimaju genetski materijal roditeljia i pomoću njega formiraju djecu, dok je operator
mutacije operator koji najćešće služi kako bi unio raznolikost u populaciju,
odnosno izbjegao eventualno zaglavljivanje algoritma u nekom lokalnom optimumu
do kojeg bi se moglo doći samo križanjem. No kao što se vidi iz poglavlja tri
moguće je baš i suprotno, da operator mutacije može pasti u lokalni optimum, a
operator križanja je tu da ga spriječi u tome i vrati na pravi put. Bitno je
još spomenuti da su genetski algoritmi spora metoda za pronalaženje rješenja,
ali zbog načina na koji rade relativno brzo mogu proizvesti dobro rješenje.
Zbog toga se sve više
napora ulaže u kombiniranje genetskih algoritama s drugim tehnikama za
rješavanje problema kako bi se brže i učinkovitije došlo do traženog rješenja.
Takvi se genetski algoritmi nazivaju hibridnima.
2. Primjena genetskih algoritama
2.1. Izračunavanje optimalnog broja prijava mobilnih telefona baznim stanicama
Lokacijski menadžment je naziv za grupu problema koja se bavi praćenjem
korisnika unutar mobilne mreže, koja je predstavljena kao skup geometrijskih
ćelija zvanih ćelije. Svaka ćelija ima svoju baznu stanicu koja je zadužena za
njeno posluživanje. Bazne stanice su povezane s MSC-om (mobilnim centrom za
usmjeravanje) koji služi kao vrata u klasičnu žičanu mrežu. Na slici ispod je
prikazana vizualizacija ovdje opisane strukture mreže uz pretpostavku da su
ćelije šesterokutnog oblika.
SLIKA 2.1 - Zamišljena arhitektura mobilne mreže
Većina komercijalnih mreža je podjeljeno u lokacijska područja (LA),
koja se mogu sastojati i od više ćelija, a od korisnika se zahtjeva da se
prijavi pri ulasku u lokacijsko područje. Ta prijava ima određeni trošak zbog
zauzimanja resursa kao i zbog potroška energije. Cilj je taj trošak
minimizirati, odnosno pronaći optimalan plan prijave za svakog pojedinog
korisnika koji će reći da li da se taj korisnik prijavi u određenom lokacijskom
području ili ne. Kako bi se taj problem riješio potrebno je poznavati koliko
često i kojom brzinom korisnik mijenja lokacijska područja te koliko često prima pozive. Ako korisnik često mijenja
lokacijska područja, ima malu vjerojatnost dolaska poziva i veliku cijenu
prijave tada je logično da će preskakanje prijave u nekoliko lokacijskih
područja dovesti do minimizacije sveukupnog troška svih prijava.
Prije samog opisa rješenja pomoću genetskog algoritma bitno je spomenuti
da su ovaj problem pokušavale riješiti i druge heurističke metode koje imaju
ugrađena velika ograničenja koja ih sprečavaju pri izračunu minimalnog troška.
Neka od tih ograničenja su ignoriranje kretanja korisnika, ignoriranje
vjerojatnosti dolaska poziva te ograničenost u obliku ćelija zbog jednostavnije
analize, iako u stvarnosti ćelije mogu biti bilo kojeg oblika. Kao što se vidi ova
ograničenja su velik problem zbog toga što su baš ona varijable problema.
Genetski algoritam koji rješava opisani problem koristi binarni prikaz
kromosoma, koji se interpretira na slijedeći način: ako je na nekom mjestu
unutar binarnog stringa jedinica, tada se u toj lokacijskoj jedinici radi
prijava, a ako je na tom mjestu nula tada se prijava ne radi. Iz ovoga se može
zaključiti da je duljina stringa jednaka broju lokacijskih područja. Početna
populacija se bira slučajnim odabirom, no kako bi algoritam brže konvergirao ka
optimumu može se poslužiti statističkim podacima o vjerojatnosti dolaska poziva
kako bi početna populacija imala veći broj nula(za manju vjerojatnost) ili veći
broj jedinica (za veću vjerojatnost) u svakom pojedinom kromosomu. Funkcija dobrote
dana je kao recipročna vrijednost cijene prijave za pojedini kromosom. To pak
znači slijedeće: što je cijena manja, dobrota kromosoma je veća. Funkcija
selekcije temeljena je na roullete-wheel selekciji što omogućuje da bolji
kromosomi imaju i više od jedne kopije u slijedećoj generaciji. Nakon selekcije
dolazi do križanja i mutacije kako bi se dodatno izmjenili kromosomi za
slijedeću generaciju. Parametar za križanje korišten u algoritmu je 0.8, a za
mutaciju je 0.01. Na kraju se izračunaju dobrote novih kromosoma i cijeli se
ciklus ponavlja.
Jedan primjer rezultata rada algoritma prikazuje slijedeća tablica u
kojoj je λ vjerojatnost dolaska poziva, Cu cijena pojednične
prijave, a Cp cijena „paginga“
što je naziv za konstanto traženje korisnika unutar cijele mreže. Do optimalnog
se rješenja došlo unutar 1000 generacija. Iz tablice je također vidljivo da za malu vjerojatnost
dolaska poziva i za visoku cijenu prijave broj nula u kromosomu dominira.
|
Cu/Cp |
Optimalna Strategija |
||
|
λ = 0.25 |
λ = 0.5 |
λ = 0.75 |
|
|
.1 |
1111111111 |
1111111111 |
1111111111 |
|
.2 |
1111111111 |
1111111111 |
1111101111 |
|
.3 |
1111001111 |
1111101111 |
1111101111 |
|
.4 |
0110010110 |
1111001111 |
1111001111 |
|
.5 |
0001001000 |
1111001111 |
1111001111 |
|
.6 |
0001001000 |
1110100111 |
1111000111 |
|
.7 |
0000100000 |
1110000111 |
1110001111 |
|
.8 |
0000100000 |
0110000110 |
1110000111 |
|
.9 |
0000010000 |
0110000110 |
1110000111 |
|
1 |
0000010000 |
0110000110 |
1110000111 |
TABLICA 2.1 - Optimalne strategije za različite parametre
Algoritam je jednostavan za implementaciju, za rad zahtjeva dva
statistička parametra do kojih je lako doći i nema nikakvih ograničenja
klasičnih metoda koja bi ga odvukla od optimuma.
Originalni naslov:
„A
New Location Update Strategy for Cellular Networks and its Implementation using
a Genetic Algorithm“
Autori:
Sajal
K. Das, Sanyoj K. Sen
Dostupan na:
ACM,
http://www.acm.org
2.2. Dizajn topologije lokalnih mreža
Dizajn topologije LAN-a je složen kombinatorički problem koji se
klasificira kao NP – težak problem. Kako ne postoje polinomijalni algoritmi
koji bi rješavali ovaj problem, za njegovo se rješavanje koriste heuristički
algoritmi. Cilj algoritma je napraviti raspored s minimalnim prosječnim
kašnjenjem u mreži. Problem se može podijeliti na dva glavna dijela:
1a) u koliko segmenata treba
podijeliti mrežu
1b) kako dodjeliti korisnike
svakom segmentu tako da jedan korisnik pripada samo jednom segmentu
2) problem usmjeravanja koji je
definiran kao određivanje veza između segmenata u razapinjuće stablo
Kako bi se rješenje lakše razumijelo,
uz kratak opis problema slijedi i opis promatranog modela. Neka se LAN sastoji
od N korisnika. Matrica prometa između korisnika je matrica tipa n x n koja
opisuje zahtjeve između pojedinih korisnika. Jedan element te matrice
predstavlja promet između dva korisnika, a bitna karakteristika tog prometa je
da on može biti jakog, slabog ili nikakvog intenziteta te da može biti
privremen ili konstantan. Za potrebe ovog algoritma pretpostavlja se da su
prometne karakteristike poznate.
Također sam je LAN podijeljen u P
segmenata (token-ring, ethernet,...)
koji su povezani mostovima (bridgevima).
Svaki segment je poznatog kapaciteta, ali svaki je segment drugačiji po
ponašanju od ostalih segmenata. Kašnjenja unutar pojedinih segmenata utječu na
kašnjenje cijele mreže, a kako promet unutar jednog segmenta teži njegovom
kapacitetu, tako i prosječno kašnjenje unutar tog segmenta teži ∞.
Kašnjenju još dodatno pridonosi i kašnjenje mostova zbog pretraživanja unutar
look-up tablica i čekanja paketa u redu za ulaz u slijedeći(odredišni) segment.
Prije samog opisa genetskog algoritma još jedna potvrda kompleksnosti problema
je i veličina prostora rješenja koja je definirana formulom (1) (P i N su definirani u prethodnim
odlomcima)
 (1)
(1)
Segmenti LAN-a se spajaju u oblik razapinjućeg stabla. Kako se LAN
sastoji od P segmenata tako i stablo ima
P čvorova. Svaki čvor ima maksimalno P-1 dijete, a maksimalna dubina stabla je
P div 2. Ovakav raspored zahtjeva i odgovarajuću strukturu podataka, a genetski
operatori moraju biti takvi da primjenjeni na jedno stablo kao rezultat daju
novo razapinjuće stablo.
Stoga je za tip podataka odabrano
razapinjuće stablo prikazano kao rijetko Huffmanovo stablo. Svaki čvor u tom
stablu ima jedinstvenu oznaku koja ujedno predstavlja i put od korijena do tog
čvora gdje je duljina oznake jednaka duljini puta.
SLIKA 2.2
- Virtualno Huffmanovo stablo s P = 5
Na slici je predstavljeno virtualno
Huffmanovo stablo s P = 5. λ označava korjen stabla, a grane su označene s
1,2,3,4. List (put) s oznakom 32 označava da se treba spustiti u granu 3 i ići
do drugog (2) lista u toj grani.
Kako bi se ovakav način označavanja mogao uspješno koristiti za prikaz
kromosoma potrebno je da sve oznake čvorova budu jednake duljine. U tu se svrhu
kodiranju dodaju „0“ na kraj sve dok se na dođe do pune duljine oznake. Na ovaj
se način može prikazati bilo koja LAN topologija.
Početna se populacija stvara tako da se generira P slučajnih Huffmanovih
oznaka. Kako one na moraju biti inicijalno vezane u valjano stablo radi se
postupak fiksacije prikazan na slijedećoj slici.
SLIKA 2.3 - Fiksiranje virtualnog Huffmanovog stabla. (a) odabrani
čvorovi i (b) fiksirano stablo
Detaljnije pojašnjenje samog postupka fiksacije nalazi se u izvornom
članku. Za prikazani slučaj kromosom izgleda ovako: 0010203034.
Nakon fiksacije definiran je broj segmenata u koji će biti podjeljena
mreža kao i veze između LAN-ova. Još treba odrediti prikaze ostalih dijelova
problema. Oni se definiraju kao dva dodatna kromosoma. Drugi kromosom sadrži
redoslijed dodjeljivanja segmenata.Treći kromosom predstavlja distribuciju
korisnika unutar jednog segmenta. Rješenje je pojednostavljeno prikazano kao {Cconf,Cclust,Corder}.
Genetski operatori se primjenjuju na sva tri kromosoma. Funkcija dobrote je
predstavljena kao recipročna vrijednost prosječnog kašnjenja čime je postignuta
veća vrijednost dobrote za manje kašnjenje. Primjeri rada algoritma kao i
dodatne formule koje pojašnjavaju problem nalaze se u originalnom članku.
Originalni naslov:
„Topological Design of
Local-area Networks Using Genetic Algorithms“
Autori:
Reuven Elbaum, Moshe Sidi
Dostupan na:
http://www-comnet.technion.ac.il/moshe/PUBS/m_sidi_topology_96.pdf
2.3. Raspoređivanje instrukcija
Raspoređivač instrukcija kao pojam označava odabir, iz velikog skupa
konkurentnih instrukcija, jednog kombinaciju koja smanjuje i vrijeme izvođenja
i prostor koje program, čije su to instrukcije, zauzima. S obzirom na to da je
ovo jako kompleksan problem klasične metode pretraživanja ne daju dobre
rezultate, a kako niti većina heurističkih metoda ne daje dobre rezultate u
ovom problemu do izražaja dolaze genetski algoritmi kao dobra metoda
pretraživanja prostora rješenja valjanih rasporeda zbog svojih operatora
križanja i mutacije. Dodatna pogodnost genetskih algoritama je i to da se oni
mogu vremenski ograničiti to jest korisnik može direktno utjecati na duljinu
izvođenja algoritma što kod nekih drugih metoda nije slučaj.
Tip podataka korišten za predstavljanje ovog problema je DDD (data
dependence dag). Čvorovi u DDD-u su operacije koje se izvode, a lukovi
predstavljaju redosljed izvođenja operacija.
Funkcija dobrote za problem je definirana kao broj instrukcija koje
sadrže operacije plus duljina puta koji sadrži instrukcije koje se moraju
serijski izvoditi. Neki rekombinacijski operatori koji se mogu koristiti za
ovaj problem su križanje s dvije točke prekida, rubna rekombinacija, kružno
križanje...
Uvijet zaustavljanja algoritma je poseban problem zbog krajnjeg
rezultata. Jedan mogući uvjet je približavanje rješenja njegovoj najboljoj
teorijskoj vrijednosti. Vremenska ograničenja nisu baš povoljna zbog činjenice
da se optimalno rješenje može naći već u prvoj generaciji ili se ne mora naći
uopće. Broj generacija kao uvjet je ovisan o složenosti koda koji se optimira. Za
složeniji kod potrebno je više generacija kako bi se došlo do optimalnog
rješenja.
Originalni naslov:
„Genetic Algorithms and
Instruction Scheduling“
Autor:
Steven J. Beaty
Dostupan na:
emess.mscd.edu/~beaty/Dossier/Papers/genetic.pdf
2.4. Jednoliku podjelu hiper - grafova
Kao što sam naslov kaže cilj je podjeliti graf na dva približno jednaka
dijela s minimalnim brojem presjeka.Taj se probelm klasificira kao NP – težak.
Genetski algoritam koji rješava ovaj
problem ima par specifičnosti i to su: lokalna optimizacija nakon svake
iteracije (zato je to hibridni genetski algoritam) te uvođenje grupiranih
shema.
Kromosom je predstavljen kao niz
bitova onolike duljine koliko ima vrhova u grafu sa slijedećim značenjem:
jednica označava da vrh na tom bitovnom mjestu pripada desnom grafu u podjeli,
dok nula označava da pripada lijevom grafu. Naziv za ovakvo kodiranje je
lokacijsko kodiranje.
Algoritam radi tako da u svakoj
generaciji izabere dva roditelja koja se križaju na način prikazan na slici:
SLIKA 2.4
- Križanje s pet točaka prekida
Kao što se iz slike vidi koriste se
dvije varijante križanja s 5 točaka prekida. Razlika u tim načinima križanja je
to što se kod desnog križanja na slici koriste komplementarne vrijednosti nekih
bitova. To se radi zobg toga jer se može dogoditi slučaj da je jedan roditelj
komplement ili skoro komplement drugome što znači da oni zapravo predstavljaju
iste ili jako slične grafove (jednaka podjela). Genetski algoritam izabire
bolje od dvoje djece te nad tim djetetom provodi mutaciju s vjerojatnošću promjene
gena od 0.015.
Nakon mutacije provodi se lokalna
optimizacija kao jedan oblik Fidducia – Mattheyses algoritma. To je ujedno i
vremenski najzahtjevniji dio algoritma. Nakon lokalne optimizacije algoritam
odlučuje da li će dijete ući u populaciju ili ne i to tako da uspoređuje
podjelu grafa u djetetu s podjelom u
sličnijem roditelju. Ako je podjela djeteta bolja tada ono ulazi u populaciju,
inače ne. Kako bi se spriječio velik broj generacija bez promjene populacije
genetski algoritam uspoređuje dijete i s drugim roditeljem. Slijedeći pseudokod
opisuje rad algoritma
preprocess;
/* optional, dodatne pripreme za brži rad algoritma */
create
an initial population;
do
{
choose parent1 and parent2 from population;
offspring = crossover(parent1, parent2);
mutation(offspring);
local-improvement(o_spring); /* a modiffed FM
alg. */
if suited(offspring) then replace(offspring);
}
while (stopping criterion not satisfied);
return
the best member of the population;
Originalni naslov:
„A Fast and Stable Hybrid Genetic Algorithm
for the Ratio-Cut Partitioning Problem on Hypergraphs“
Autori:
Thang Nguyen Bui, Byung Ro Moon
Dostupan na:
ACM, http://www.acm.org
2.5. Djeljenje grafova i inkrementalno djeljenje grafova
Problem podjele grafa na jednako velike grupe čvorova, s minimalnim
brojem lukova između različitih grupa, je jako važan problem u paralelnom
računarstvu. Npr. u višeprocesorskom sustavu poželjno je da se aplikacije
izvode što je moguće više paralelno, da se podaci jednoliko raspodjele na
procesore, a sa što manjom međuprocesorskom komunikacijom.
Genetski algoritam koji je ovdje opisan koristi posebno dizajnirane
operatore križanja koji značajno unapređuju rad algoritma u odnosu na klasične
operatore. Zahvaljujući tome rezultati dobiveni korištenjem ovog genetskog
algoritma su bolji ili usporedivi s najboljim metodama za djeljenje grafova s
nekoliko stotina čvorova.
Kromosomi su prikazani kao nizovi bitova gdje bitovno mjesto označava
čvor, a broj na bitovnom mjestu označava kojoj podjeli taj čvor pripada.
Funkcija dobrote definirana je pomoću troška izračuna čvora vi i
troška svih izlaznih vrhova.
Operatori križanja su:
KNUX – neuniformno križanje s
znanjem iz prošlosti
DKNUX – dinamički KNUX
KNUX (Knowledge Based Non-Uniform Crossover) operator koristi uniformno
križanje, ali sa slijedećim dodatkom: koristi se vektor vjerojatnosti p čije
komponente su realni brojevi između 0 i 1 dobiveni iz dobrota roditelja i same
specifičnosti problema. Ako su A i B roditelji, C dijete, p vektor vjerojatnosti
tada je ci= ai ako je ai = bi,
inače je ci= ai s vjerojatnošću pi.
DKNUX (Dynamic KNUX) tokom rada algoritma konstanto unapređuje vektor
vjerojatnosti pi.
Originalni naslov:
„Genetic Algorithms for Graph Partitioning
and Incremental Graph Partitioning“
Autori:
Harpal Maini, Kishan Mehritra,
Chilukuri Mohan, Sanjaj Ranka
Dostupan na:
ACM, http://www.acm.org
2.6. Problem pakiranja kutija u tri dimenzije
Klasičan problem pakiranja kutija može se najjednostavnije opisati na
slijedeći način: postoji konačan skup paketa koje treba pakirati u skup kutija.
Paketi su definirani svojom „težinom“, a kutije kapacitetom.
Ovaj problem ima široku primjenu, od
pakiranja kamiona, alokacije memorije u računalima, maksimalnog iskorištenja
materijala pri rađenju manjih komada iz velikih ploča,...
Ovaj problem je generalizacija
problema dijeljenja i to tako da kutija predstavlja veličinu segmenta, a paketi
se moraju optimalno smjestiti u te segmente. Ograničenja u problemu ovise o
njegovoj primjeni koja može biti jako široka, što se vidi i iz gore navedenih
primjena.
U klasičnom problemu kutija je fiksnog
kapaciteta. S proširenjem na više dimenzija analogno se može definirati da
svaka dimenzija ima fiksni kapacitet.
3D kutija je podjeljenja na kriške i
nivoe. Nivoi su horizontalne granice između dva sloja paketa, a kriške su
vertikalne granice između dva sloja.
Mogući načini pakiranja su
slijedeći:
3D NextFit
– algoritam počinje na prvom nivou i prvoj kriški. Paket se smješta na
slijedeću slobodnu poziciju na nivou sve dok se ne dođe do širine kutije. Tada
se otvara novi nivo i nastavlja se pakiranje. Baza novog nivoa je najviši paket
na nivou. Nova kriška se stvara ako je paket prešao dužinu kutije.
Rezultat je visina kutije. Cilj je da
bude što manja.
3D
FirstFit – početak je jednak kao i u 3D NextFit - u, no kasniji smještaj se radi
tako da se pretražuju nivoi sve dok se ne nađe mjesto u koje paket stane.
Duljina nivoa se može mijenjati, povećavati tako da paket stane, sve dok se ne
dođe do dužine kutije. Nije bitno ako promjena na jednom nivou uzrokuje pomake
na drugim novima. Isti princip vrijedi i za kriške.
Kromosom je prikazan kao niz cijelih brojeva: broj 1 predstavlja prvu kutiju, 2 drugu, itd. Funkcija
dobrote vraća visinu kutije popunjenu s jednim od ova dva algoritma. Što je
visina manja to je pakiranje bolje. Križanje kao rezultat mora dati permutaciju
paketa oba roditelja. Za to se koristi PMX, kružno križanje, ... Dijete mora
biti takvo da nema duplikata. Mutacija zamjenjuje dva slučajno odabrana paketa
i rotira ih oko slučajno odabrane osi. Vjerojatnost mutacije je veća što je
veća sličnost roditelja.
Originalni
naslov:
„A genetic Algorithm for Packing in Three
Dimensions“
Autori:
Arthur L. Corcoran III, Roger L. Wainwright
Dostupan
na:
ACM, http://www.acm.org
2.7. Problem ortogonalnog pakiranja
Ovaj problem je jedan podskup problema pakiranja kutija, a problem se
može definirati na slijedeći način – neka je dan konačan broj pravokutnika ri,
i = 1, .. ,n i pravokutna ploča zadane širine i beskonačne dužine. Cilj je
minimizirati dužinu ploče tako da su svi pravokutnici smješteni na ploči bez
preklapanja i tako da su im stranice paralelne sa stranicama ploče.
Algoritam koji rješava dani problem
zove se „bottom – left“ algoritam.
Jedno pakiranje je označeno kao jedna moguća permutacija pravokutnika
π = (i1,...,in)
i je indeks pravokutnika
Redosljed pakiranja dan je
redosljedom indeksa u π. Dodatno poboljšanje algoritma koje se koristi u
praksi je slijedeće:
1)
prvi pravokutnik se smjesti u donji lijevi kut ploče
2, 3, 4, ...) pomakni i-ti
pravokutnik počevši od gornjeg desnog kuta do dna pa onda lijevo koliko god je
to moguće, s time da spuštanje ima prioritet
SLIKA 2.5
- Ilustracija BL algoritma
Iz slike se vidi da je prvo r2
spušten do dna pa gurnut lijevo do kraja. Isto tako i za r1 i r4
. Strelica pokazuje način smještaja r3.
Genetski algoritam je slijedećeg
oblika:
SLIKA 2.6
– Skica genetskog algoritma
Početni
parametri algoritma su:
početna
veličina populacije koja je 100
roullete –
wheel slekcija
cikličko
križanje
50 %
vjerojatnost križanja, 1% vjerojatnost mutacije
kraj nakon 5
generacija
Jedan član populacije je jedna permutacija
pravokutnika.
Detaljniji
rad algoritma je slijedeći:
1) odredi veličinu danog područja
u % svake komponente
2) odredi skup dimenzija za svaku
komponentu
On se određuje ili pomoću formula danih u orginalnom članku ili može biti
određen prema željama dizajnera na neki drugi način sve dok je zadovoljeno da
je dužina x širina uvijek jednaka površini pravokutnika.
3) odredi skup komponenti
(permutacije pravokutnika)
U ovom se koraku bira jedna kombinacija za svaki pravokutnik(dužina x
širina) koja ulazi u populaciju. Sukladno s time u ovom se koraku bira i
početna populacija slučajnim odabirom premutacija.
4) izračunaj dobrotu svakog člana
populacije
f(x) = H(x) –
IzgubljenoPodručje / (h * w)
gdje je
H(x)
= (H-h) / H
H
je velika konstanta da se osigura pozitivan H(x)
IzgubljenoPodručje
= Ukupno – PovršinaSvihPravokutnika
h
= visina uzorka
w
= širina uzorka
Cilj je minimizirati visinu ploče, no ovako
definirana funkcija dobrote, kaže da što joj je veća vrijednost to je jednika
bolja!
5) provjeri da li je zadan kriterij optimalnosti zadan od dizajnera. Ako
je, sačuvaj najbolja rješenja i ponovi postupak za drugu kombinaciju
komponenti. Ako nisu zadovoljeni uvjeti radi se roullete - wheel selekcija, jednostavno križanje između
roditelja te mutacija koja mijenja slučajne članove unutar jedne permutacije.
Veličina nove populacije je dva puta veličina stare populacije. Sada se opet
provodi BL algoritam i ponavlja se postupak pod 4 i 5 sve dok ne bude
zadovoljen kriterij optimalnosti.
Originalni naslov:
„AN
EXTENSION OF THE ORTHOGONAL PACKING PROBLEM THROUGH DIMENSIONAL FLEXIBILITY“
Autori:
Alison R. Callaghan,
Anoop R. Nair, Kemper E. Lewis
Dostupan na:
does.eng.buffalo.edu/publications/
publications/DETC99_DAC-8588.pdf
2.8. Numeričku optimizaciju funkcija
GAVIn (Genetic Algorithms Visual Interface) je MS Windows aplikacija koja
opisuje osnovne principe rada genetskih algoritama kroz numeričku optimizaciju
funkcija. Aplikacija omogućuje korisniku da mijenja parametre genetskog
algoritma kako bi korisnik sam mogao vidjeti kako različite postavke parametara
utječu na rad algoritma. Program koristi binarni prikaz kromosoma jer je on
standard za ovaj tip problema.
Korisnik može sam definirati
duljinu kromosoma, veličinu populacije, način završetka rada algoritma, vrstu
selekcije, vrstu križanja, vrstu mutacije i još dosta drugih parametara. Uz to
program ima ugrađene testne funkcije
kojima se može provjeravati rad programa.
Originalni naslov:
„A
Genetic Algorithms Tutorial Tool for Numerical Function Optimisation“
Autori:
E.K.Burke, D.B. Varley
Dostupan na:
ACM, http://www.acm.org
2.9. „Učenje kretanja“ 3D likova u simuliranom svijetu
Moderna računalna animacija
zahtjeva sve više i više od svojih likova kako bi oni izgledali što realnije u
svojim pokretima. Ovaj rad opisuje jedan jednostavan svijet s trenjem,
gravitacijom i bićem koje živi u tom svijetu. Želja je iskoristiti genetski
algoritam kako bi to biće naučilo kretati se i skakati ne bi li došlo do cilja. Biće je predstavljeno pomoću kocaka koje su
spojene oprugama. Neke opruge su fiksne dok su druge fleksibilne (predstavljaju
mišiće). Svijet je tako modeliran da u njemu vrijede zakoni fizike.
Kromosomi u genetskom algoritmu su
definirani kao kretnje pojedinog mišića (kromosom sadržava informaciju o
trenutom položaju svih mišića). Akcija koju mišić može imati je širenje,
stezanje ili mirovanje.
Algoritam radi na slijedeći način:
1)
izračunaj dobrotu svake jedinke
2) kopiraj najboljih deset jedinki
u novu populaciju koristeći roulette - wheel selekciju
3)
slučajno odaberi dva roditelja i križaj ih
4)
predodređenom broju jedinki zamijeni jedan gen
5)
kopiraj najbolju jedinku u novu generaciju kako bi se spriječila
degeneracija
Iz ovoga se vidi da su genetski
algoritmi jako korisni u kreiranju kompleksnih pokreta uz ispravno definiranu
funkciju dobrote. No u dinamičkim situacijama(poput igara) rezultati baš i nisu
tako dobri ako se ne koriste trikovi pri stvaranju slike.
Originalni naslov:
„Goal
oriented control of simulated physical systems with genetic algorithms“
Autor:
Teemu Maki - Patola
Dostupan na:
http://www.tml.hut.fi/~tmakipat/GA.pdf
2.10. Sintezu sklopovlja i programa
MOGAC je program koji služi za sintezu distribuiranih heterogenih
hardver – softver sustava koristeći
višeciljne genetske algoritme. Algoritam koristi niz ograničenja kako bi sveo
na optimum i cijenu i potrošnju energije budućeg sustava. MOGAC je sposoban
generirati sustav s više procesnih elmenata s višestrukim sabirnicama i vezama
točka – do – točke.
Problem sinteze ove vrste spada u
probleme višeciljne optimizacije zato jer postoji puno vrsta troškova koje
treba uzeti u obzir, a među njima postoji takva ovisnost da se smanjenjem
jednog troška najčešće povećava neki drugi trošak. Višeciljni genetski
algoritmi rješavaju ovaj problem tako da rješenja relativno poredaju prema
drugim rješenjima (redni broj rješenja je broj drugih rješenja kojima je to
rješenje superiorno) za razliku od drugih metoda koje taj problem znaju
rješavati tako da samo spoje troškove u jednu vrijednost.
Najvažniji operator kojeg MOGAC
posjeduje je operator križanja jer taj operator daje svu snagu ovog algoritma
zbog toga što omogućuje da različita rješenja međusobno dijele informacije. Uz
to parametri algoritma su samo prilagodljivi, što znači da ukoliko u jednoj
generaciji ne dođe do poboljšanja vjerojatnost mutacije i kromosoma se
povećava. Kad se pak dogodi poboljšanje vrijednosti se vraćaju na inicijalne
vrijednosti. Algoritam staje ako prođe određen broj generacija bez ikakvog
poboljšanja.
MOGAC posjeduje svojstvo elitizma
koje je korisnički prilagodljivo, korisnik može sam odlučiti da li će se
najbolje jednike sačuvati ili se mogu mijenjati koristeći križanje i mutaciju.
Dodatna posebnost MOGAC-a je i to da se operatori dijele na operatore koji djeluju
na nivou cijelog rješenja i na operatore koji djeluju na nivou pojedinih
skupina unutar pojedinog rješenja.
Ovo je samo kratak opis problema kao
i prikaz najvažnijih dijelova MOGAC-a, sve je to detaljno obrađeno u
originalnom članku, uz primjer rada samog programa(usporedbe u radu s drugim
programima tog tipa).
Originalni naslov:
„MOGAC:
A Multiobjective Genetic Algorithm for the Co-Synthesis of Hardware-Software
Embedded Systems“
Autori:
Robert P. Dick, Niraj K. Jha
Dostupan na:
ACM, http://www.acm.org
2.11. Rješavanje problema n – kraljica
Problem n – kraljica je
jedan od onih problema koji je jako jednostavan za definiciju, ali je jako
kompliciran za implementaciju. Definicija problema je slijedeća: kraljica je
šahovska figura (može se kretati u svim smjerovima, dok se god kreće u pravocrtnoj
liniji), cilj je rasporediti n kraljica na ploču veličine n x n tako da se niti
jedna kraljica ne tuče međusobno, to jest da niti jedna kraljica iz svog
položaja ne može napasti bilo koju drugu kraljicu.
SLIKA 2.7
– Prikaz kromosoma pomoću četvorki
Broj svih mogućih kombinacija je n2
povrh n, što ovaj problem čini jako teškim, no dobra stvar je što se već u
startu može eliminirati velik broj kombinacija pametnim prikazom jedne
kombinacije. Na slici 1 je jedan prikaz koji omogućuja eliminaciju jednog
dijela rješenja, a koje se koristi i za ovaj algoritam. Jedna kombinacija je
prikazana kao n – torka svih kraljica tako da svaki član n – torke govori u
kojem se redu nalazi neka kraljica, dok njegova pozicija unutar n – torke govori
u kojem stupcu je ta kraljica. Na ovaj način su rješene sve moguće konfliktne
situacije u kojima se mogu naći dvije kraljice ako se nalaze u istom redu ili
stupcu. To je moguće zbog vrlo važnog ograničenja koje kaže da su brojevi u n –
torci svi međusobno različiti. Time
složenost naglo pada na n! no kako je to još uvijek jako velika složenost u
igru ulaze genetski algoritmi.
Jedan kromosom u genetskom algoritmu je jednak jednoj n –
torci definiranoj na gore opisan način. Operator križanja je definiran kao
križanje s dvije točke prekida, ali postoji problem koji se vidi na slici 2.8.
Problem je što pri križanju može doći do duplikata unutar jedne n – torke,
(2 5 1 | 3 8
4 | 7 6)
(8 4 7 | 2 6
1 | 3 5)
postaje
(2 5 1 | 2 6
1 | 7 6)
(8 4 7 | 3 8
4 | 3 5)
SLIKA 2.8
– Križanje s dvije točke prekida s neispravnim n – torkama
Taj se
problem rješava na slijedeći način:
(2 5 1 | 3 8
4 | 7 6) (2 5 1 | 3 8 4 | 7 6)
(8 4 7 | 2 6
1 | 3 5) (8 4 7 | 2 6 1 | 3 5)
postaje postaje
(2 5 1 | 2 6
1 | 7 6) (3 5 4 | 2 6 1 | 7 8)
(8 4 7 | 3 8 4 | 3 5) (6 1 7 | 3 8 4 | 2 5)
SLIKA 2.9
– Na lijevoj strani slike nalazi se križanje sa slike 2.8, dok se na desnoj
strani nalazi ispravno križanje korištenjem PMX - a
Za prvo dijete – dvojka na poziciji
1 je u sukobu s dvojkom na poziciji 4. Kako je dvojka na poziciji 4 novija
dvojka na poziciji 1 se mijenja u vrijednost koja je bila na poziciji 4 prije križanja
to jest u vrijednost 3. Ovakvo križanje se zove Partially Matched Crossover
(PMX). Operator mutacije je s druge strane skroz jednostavan i on samo
zamijenjuje mjesta dva broja unutar jedne n – torke čime je ujedno i sačuvana
raznolikost svih članova n – torke.
(3 5 4 2 6 1
7 8)
postaje
(3 1 4 2 6 5
7 8)
SLIKA 2.10
– Jednostavna mutacija
PMX način križanja ima problem da želi unificirati populaciju smanjujući
time brzinu pronalaženja optimuma pa je preporučljivo u kasnijoj fazi rada
algoritma za operator križanja koristiti onaj defniran za mutaciju.
Osim ovog problema postoji
i problem pri određivanju funkcije dobrote, a taj problem je slijedeći:
genetski algoritmi vole dobrote koje imaju puno vrijednosti kako bi se vidjela
raznolikost populacije, a u ovom slučaju rješenje ima samo dvije vrijednosti
ili je ispravno ili nije. Stoga se time doskočilo uvođenjem funkcije
zadovoljivosti koja ima rješenja u intervalu
[0,1] to jest ispravna rješenja imaju vrijednost 1, a ona neispravna se
rangiraju po tome da li više neispravna (bliže nuli) ili više ispravna (bliže
jednici). Uz ovakvu defniciju dobrote može se koristiti i ona jednostavnija, a
to je da se samo pobroje konflikti među kraljicama. Rješenja kao i vremena
izvođenja su usporediva za obje definicije funkcije dobrote.
Originalni naslov:
„Solving the n – Queens Problem Using
Genetic Algorithms“
Autor:
Kelly D. Crawford
Dostupan na:
ACM, http://www.acm.org
2.12.Učenje Bayes – ianskih kasifikacijskih pravila
DELVAUX je sustav
za induktivno učenje koji koristi genetske algortime za proces učenja. Sustav
služi za učenje Bayes – ianskih klasifikacijskih pravila iz skupa primjera.
Ukratko Bayesianska klasifikacijska pravila su mješavina simboličkih i
numeričkih vrijednosti. Simboličke vrijednosti su uvjeti s lijeve i desne
strane, a numeričke su npr. vrijednost koja predstavlja težinu nekog svojstva u
nekom skupu pomoću kojeg će sustav reći da li je za ili protiv nekog zaključka.
Jedan primjer takvog pravila je slijedeći:
If E then
(to degree S,N) H
gdje su S
i N veličine pomoću kojih se određuje zadovoljivost i potrebitost H za E.
Jedan kromosom je skup pravila sa
svojstvom da različiti kromosomi mogu biti različith duljina. Operator križanja
je križanje s jednom točkom prekida sa svojstvom da roditelji tokom križanja
međusobno izmjenjuju pravila. Do nejednakosti u duljini kromosoma dolazi kada
točka prekida nije postavljena na ista mjesta u oba roditelja.
roditelj
1: r1 | r2 r3  r4
dijete 1: r1 s4
r4
dijete 1: r1 s4
roditelj
2: s1 s2
s3 | s4 dijete
2: r2 r3
r4 s1 s2 s3
točke prekida
Optimalnu kardinalnost algoritam sam uči. Operator mutacije radi tako da
jedno pravilo izbaci van iz skupa pravila i na njegovo mjesto stavi slučajno
izgrađeno pravilo. Uz ova dva operatora koristi se i operator inverzije koji
radi tako da promjeni mjesta pravila unutar kromosoma što utječe na kompozicije
budućih generacija (zbog križanja). Broj članova populacije je konstantan kroz
sve generacije. Najbolji član populacije uvijek preživljava.
slijedeca_generacija(t)
: =
UMETNI najbolji_clan_od (G (t)) u G(t+l) ;
DO {
Odaberi clanove rul i ru2 iz G(t) slucajnim
odabirom;
Cini {
Ako treba_krizati
tada krizaj(rul, ru2, rul’, ru2’)
inace { rul' :=rul; ru2':= ru2 }
Ako treba_mutirati tada rul’:= mutiraj(rul’);
Ako treba_mutirati tada ru2’:= mutiraj(rul’);
Ako treba_invertirati tada rul’:= invertiraj(rul’);
Ako treba_invertirati tada ru2’:= invertiraj(ru2’);
Umetni rul’ u G(t+l);
Umetni ru2’ u G(t+l) }
S VJEROJATNOSCU h’(rul)*h’(ru2); }
DOK NIJE populacija G(t+l) popunjena;
SLIKA 2.11
– Generiranje slijedeće generacije
Ova slika predstavlja način
nastajanja nove generacije (ru1, ru2 su roditelji; ru1' i ru2' su djeca). Ako
treba ... predstavlja vjerojatnost obavljanja te operacije.
Također bitno je i reći da se cijeli
taj kod obavlja s određenom vjerojatnošću koja je određena kao h'(ru1) *
h'(ru2) gdje je h'
![]() (2)
(2)
gdje su:
r je broj pravila u
skupu pravila,
p je broj premisa,
c
je broj konkluzija,
h(ru) je dobrota pojedinog
pravila određena kao postotak dobro klasificiranih slučajeva.
Originalni naslov:
„Learning Bayesian Classification Rules
through Genetic Algorithms“
Autori:
Christoph
F. Eick, Daw Jong
Dostupan na:
ACM,
http://www.acm.org
2.13. Proračun smještaja makro ćelija
Jedna
moguća definicija problema je:
Za
slijedeće ulazne vrijendosti:
1) postoji skup pravokutnih ćelija, s izvodima na rubovima
2) mrežna lista koja opisuje spajanje izvoda
3) horizontalana duljina pločice W
algoritam
treba pronaći
1) apsolutne koordinate donjeg lijevog
kuta svake ćelije
2)
točan položaj svake ćelije (orijentacija i rotacija)
3)
pravokutnik širine W minimalne duljine takav da su sve ćelije smještene na
njemu
uz ova
ograničenja
1) ćelije se ne smiju preklapati
2) pravokutnik mora ostaviti dovoljno
mjesta između ćelija da se sve
međusobne veze mogu ostvariti
Problem je zapravo sličan problemu 2D pakiranja kutija što će se kasnije
i vidjeti jer program koristi BL – algoritam za smještaj ćelija na ploćicu.
Složenost ovako definiranog problema je
O(n! 8n) što ga čini jako teškim problemom za rješavanje.
Rad algoritma prikazan je na slici 2.12:
generiraj(PC);
evaluiraj(PC);
ponavljaj
noOfGenerations puta:
PN := 0;
ponavljaj noOfOffspring puta:
odaberi p1 € PC, p2
€ PC;
PN := PN U krizaj(p1,
p2);
kraj;
evaluiraj(PC U PN);
PC := odaberi(PC U PN);
zaSvaki p € PC : moguca_mutacija (p);
evaluiraj(PC);
kraj;
q
:= oadberi Najboljeg;
optimiziraj(q);
SLIKA 2.12 – Skica Algoritma
Kromosom je prikazan kao stablo u kojem svaki čvor predstavlja jednu ćeliju,
a lukovi su orijentirani i dijele se na „top
- edges“ i „right - edges“. Za
jedan čvor top – edge pokazuje na čvor koji je fizički iznad njega, a right –
edge je čvor koji je fizički desno do njega (čvor = ćelija). Iz ovoga je očito
da svaki čvor ima maksimalno jedan top i jedan right edge. Korijen stabla je
ćelija koja se nalazi u donjem lijevom kutu.
Funkcija dobrote u sebe uključuje površinu koju zauzimaju ćelije i što
manju duljinu žica koje spajaju ćelije.
Operator križanja između dva roditelja daje dijete tako da izabere
povezani skup čvorova iz jednog roditelja i prema zadanim pravilim doda ostale
čvoroe iz drugog roditelja.
Postoji pet vrsta mutacija koje su definirane za ovaj problem, sve se
odvijaju nad ćelijama. Jednostavnije su rotacija ćelije, promjena orijentacije
ćelije, promjene susjeda jedne ćelije....
Naravno pri mutacijama se mora uvijek provjeravati da li su zadovoljena
ograničenja.
Originalni
naslov:
„A Genetic Algorithm for Macro Cell
Placement“
Autor:
Henrik Esbensen
Dostupan na:
http://www.ee.utulsa.edu/~tmanikas/Pubs/Manikas-MWSCAS-02-final.pdf
2.14. Sintezu CMOS operacijskih pojačala
Pri izradi
elektroničkih sustava puno više vremena odlazi na izradu analognih dijelova
nego digitalnih. Razlog tome je to što postojeće analogne komponente najčešće
nisu dovoljne za izradu svih potrebnih funkcija pa se stoga ostatak mora raditi
ili ručno ili pomoću alata za sintezu. Ovdje je predstavljen jedan takav alat -
DARWIN.
Svojstva DARWIN-a su slijedeća:
-
simultan odabir topologije i „circuit sizing“
-
program sam gradi topologiju koristeći dostupne elemente
-
za odabir topologije i „circuit sizing –a“ koristi se genetski algoritam
-
za program nije potrebno veliko dizajnersko znanje
-
na početku sinteze za svaku građevnu jedinicu provjeravaju se ograničenja
kako bi se osiguralo da tokom izgradnje uvijek postoji željeno ponašanje sklopa
Svako operacijsko pojačalo sastoji se od tri dijela: ulaznog dijela,
opcionalnog
pojačavačkog
dijela i izlaznog spremnika.
Na temelju toga može se konstruirati
velik broj različitih topologija. No ipak, samo neke od tih topologija mogu
raditi kao operacijsko pojačalo. Na slici je prikazana spojna matrica koja
pokazuje koji su elementi međusobno kompatibilni. Križić na mijestu (i,j)
označava da element j može doći iza elementa i.
|
|
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
11 |
12 |
13 |
|
|
|
|
1 |
X |
X |
X |
X |
|
|
|
|
|
|
|
|
|
1 |
input |
|
2 |
|
|
|
|
|
X |
|
|
X |
|
|
X |
|
2 |
nMOS diff. Pair(simple) |
|
3 |
|
|
|
|
X |
|
|
|
|
X |
|
X |
|
3 |
pMOS diff. Pair(simple) |
|
4 |
|
|
|
|
|
|
X |
|
|
X |
|
X |
|
4 |
nMOS folded cascode |
|
5 |
|
|
|
|
|
|
|
X |
X |
|
|
X |
|
5 |
pMOS folded cascode |
|
6 |
|
|
|
|
|
|
|
|
X |
X |
X |
X |
|
6 |
nMOS CS |
|
7 |
|
|
|
|
|
|
|
|
X |
X |
X |
X |
|
7 |
pMOS CS |
|
8 |
|
|
|
|
|
|
|
|
X |
X |
X |
X |
|
8 |
nMOS CS with level shift |
|
9 |
|
|
|
|
|
|
|
|
X |
X |
X |
X |
|
9 |
pMOS CS with level shift |
|
10 |
|
|
|
|
|
|
|
|
|
|
|
X |
|
10 |
nMOs source follower |
|
11 |
|
|
|
|
|
|
|
|
|
|
|
X |
|
11 |
pMOS source follower |
|
12 |
|
|
|
|
|
|
|
|
|
|
|
X |
|
12 |
class AB output buffer |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
13 |
output |
SLIKA 2.13
– Spojna matrica
Uz ovo ograničenje postoje još i dodatna ograničenja koja pobliže
određuju željeno ponašanje pojačala.
U DARWIN-u su građevni elementi
prikazani pomoću svojeg imena i k – dimenzionalnog vektora α čiji su
elementi iz skupa {0,1}. Taj vektor sadrži opise svih traženih ograničenja za pojedini
element.
Početna populacija sadrži neka moguća rješenja, dakle rješenja koja nisu
optimalna, ali zadovoljavaju sva zadana ograničenja. Slijedeći korak, nakon
generiranja početne populacije, je izračunavanje dobrote jedniki koja je
definirana na temelju disipacije energije. Prije ulaska u sam genetski
algoritam sve se dobrote skaliraju na vrijednosti između 0 i 1 tako da
najslabija jednika ima vrijednost jedan a najlošija nula. Sada dolazi do
stvaranja novih jedniki pomoću križanja i mutacije, a broj novih jedniki jednak
je broj_populacije * vjerojatnost križanja. Operator križanja radi na slijedeći
način: prvi blok (ulazni stupanj) roditelja A se kopira u novu topologiju,
drugi blok se uzima od roditelja B ako je to moguće. Na kraju se blok tri uzima
od roditelja koji nije dao blok dva, ako je to moguće s obzirom na spojnu
matricu. Dodatno je uz ovakvo križanje moguće da se i α vektori roditelja
križaju (križanje s dvije točke prekida). Mutacija je izvedena tako da mijenja
mali broj elemenata unutar α vektora.
Originalni
naslov:
„DARWIN: CMOS opamp Sythesis by means of a
Genetic Algorithm“
Autori:
Wim Kruiskamp, Domine Leenaerts
Dostupan
na:
ACM, http://www.acm.org
2.15.Modeliranje, dizajn i kontrolu procesa
Ovdje su opisane tri
primjene genetskih algoritama u rudarskoj industriji.
Prva je za modeliranje „Ree - Eyring“ jednadžbe koja opisuje
proces odstranjivanja vode iz minerala. Genetski algoritam se koristi za
određivanje optimalnih konstanti za
jednadžbu kako bi se što preciznije mogao riješiti zadani problem.
Druga primjena je dizajn zrakom
upuhivanog hidrociklona. To je uređaj koji služi za razdvajanje minerala. Cilj
je odrediti optimalne vrijednosti svih parametara kako bi se dobile maksimalne
performanse.
Treća primjena je vezana uz fuzzy
logičke kontrolore. Genetski algoritam se koristi kako bi se odabrale ili
dodatno optimizirale funkcije fuzzy logičkog kontrolora. Te funkcije daju
značenja lingvističkih izraza fuzzy kontorlora. Konkretna primjena je kontrola
laboratorijskih pH sustava.
Ove primjene genetskih algoritama su
dovele do značajnih smanjenja troškova kako u izradi tako i u korištenju
izrađenih objekata.
Originalni
naslov:
„GENETIC ALGORITHMS FOR MODELLING, DESIGN,
AND PROCESS CONTROL“
Autor:
Charles L. Karr
Dostupan
na:
ACM, http://www.acm.org
2.16. Rješavanje „Busy – Beaver“ problema
„Busy Beaver“ je teorijski problem koji se definira na slijedeći
način:
Pretpostavka je da postoji Turingov
stroj s beskonačnom trakom na obje strane i s znakovima trake iz skupa {blank,
1}. Pitanje je koliki je maksimalni broj jedniica koji se može zapisati pomoću
zaustavljivog Turingovog stroja s N stanja ( stanje u kojem stroj staje nije
uključeno u ovh N) kada počne pisati na praznu traku?
Oznaka za taj broj je Σ (N)
gdje je N broj stanja. Stroj koji to radi zove se Busy Beaver (BB). Funkcija
Σ (N) nije izračunljiva. Već za N = 5 se ne može sa sigurnošću odrediti
taj broj. Iako je problem originalno zamišljen za Turingove strojeve koji barataju
s 5 – orkama rješenje koje je ovdje prezentirano radi s 4 – orkama. Turingov
stroj s 5 – orkama radi tako da pomoću
stanja u kojem je i znaka na traci odlučuje koji će simbol zapisati na traku, u
koje će stanje otići i kamo će se pomaknuti (lijevo, desno ili će ostati na toj
ćeliji). Turingov stroj koji radi s 4 – orkama radi tako da ili zapisuje novi
znak na traku ili se pomiče lijevo ili desno (ne može napraviti obje operacije
istovremeno).
Rješenje ovdje prezentirano radi za BB(7). Stroj ima 7 stanja i najbolji
razultat koji je postignut je Σ (N) ≥ 102.
Za Turingov stroj s 4 – orkama produktivnost se definira kao duljina
niza jednica napravljenih počevši na praznoj traci i s zaustavljanjem na
najlijevijoj jednici, s ostatkom trake praznom. Svi Turingovi strojevi koji se
ne zaustavljaju na taj način ili se ne zaustavljaju uopće imaju produktivnost
0.
Svaka jednika je jedno rješenje, a svaka jedinka je zakodirana u formatu
prikazanom na slicu kao binarni string.

SLIKA 2.14 – Kodiranje jedinki
Svaki blok se sastoji od po 5 bitova(tri bita za stanje i dva bita za
akciju). S ovakvom definicijom jedinki (kromosoma) mogu se slobodno koristiti
operatori križanja i mutacije bez straha da će se izaći van prostora rješenja.
Pri izračunu funkcije dobrote korišteni su slijedeći faktori poredani po
važnosti:
1) zaustavljanje prije predodređenog broja
koraka
2) ponašanje u skladu s pravilima
3) produktivnost
4)
broj korištenih prijelaza
5) broj koraka prije zaustavljanja
Neke jednike unutar populacije imaju još dodatno ugrađenu sposobnost
učenja, to jest pomoću hill – climbing
metode (Lamarckian learning) traže
lokalni optimum u svojoj okolini kako bi poboljšale svoju funkciju dobrote. Na
slici se nalazi najbolje dobiveni Turingov stroj prikazan kao konačni automat i
kao tablica prijelaza.
|
δ |
Za Blank |
Za Jedinicu |
||
|
Stanje |
Novo Stanje |
Akcija |
Novo Stanje |
Akcija |
|
1 |
2 |
1 |
f |
L |
|
2 |
3 |
R |
2 |
R |
|
3 |
4 |
R |
2 |
0 |
|
4 |
5 |
r |
5 |
L |
|
5 |
4 |
1 |
6 |
L |
|
6 |
2 |
R |
7 |
L |
|
7 |
1 |
1 |
3 |
R |
SLIKA 2.15 – Turingov stroj i njegova tablica prijelaza
Ako se želi napasti veći N pomoću ovog algoritma potrebno je napraviti
određene promjene kako bi algoritam brže radio.
Originalni naslov:
„Busy
Beaver – An Evolutionary Approach“
Autori:
Francisco B. Pereira,
Penousal Machado, Ernesto Costa, Amilcar Cardoso
Dostupan na:
http://eden.dei.uc.pt/~amilcar/publ/bbeaver.pdf
2.17.Dizajn prospojne mreže u
digitalnim sklopovima
Dizajn prospojne mreže je završna faza fizičkog dizajna integriranih
krugova. Cilj je napraviti spojnu
mrežu takvu da ona zadovoljava sva zadana ograničenja i da su spojevi u skladu
sa zadanom mrežnom listom. S obzirom na složenost problema cijelo se područje
razbija na više manjih pravokutnih površina koje se nazivaju kanali.
Cilj je pronaći kanal minimalne
širine koji je dovoljan za smještaj svih spojeva. Još dodatno je cilj da svi
ostali parametri budu minimizirani (duljina puteva, broj spojnih točaka,...)
Za kanal se koristi restriktivni
kanal koji je definiran kao kanal s kontaktima na vrhu i na dnu. Prijelazi
horizontalnih segmenata između staza nije dozvoljen.
SLIKA 2.16
– Primjer restriktivnog kanala
Horizontalne i veritkalne linije se nalaze u dva odovjena sloja.
Jedan gen u kromosomu predstavlja
odnos između dva para spojeva (m,n). Odnosi su slijedeći:
-
0 spoj m mora biti znad spoja n
-
1 spoj n mora biti iznad spoja m
-
* nije bitno
-
Kromosom
se gradi kao skup svih mogućih parova (m,n) s odgovarajućim oznakama (0,1,*).
|
Mreža m |
1 |
1 |
1 |
1 |
1 |
2 |
2 |
2 |
2 |
3 |
3 |
3 |
4 |
4 |
5 |
|
Mreža n |
2 |
3 |
4 |
5 |
6 |
3 |
4 |
5 |
6 |
4 |
5 |
6 |
5 |
6 |
6 |
|
Gen |
* |
0 |
0 |
* |
0 |
0 |
* |
0 |
* |
1 |
0 |
0 |
* |
0 |
* |
SLIKA 2.17
– Prikaz kromosoma
Kako bi se skratila duljina
kromosoma svi oni označeni s * se
izbacuju kao i oni parovi čija bi eventualna promjena položaja ugrozila
ograničenja (to se vidi u prikazu mreže grafom koji je obješnjen u članku).
Ovako skraćen kromosom sadržava samo
nule ili jedinice i kao takav se može tretirati kao binarni string što znači da
se nad njime mogu provoditi operacije križanja i mutacije definirane za binarne
stringove. Križanje je klasično s dvije točke prekida, a mutacija jednostavna
uz vjerojatnost mutacije pM.
Funkcija dobrote je vrlo jednostavna
i od variajbli uključuje broj zauzetih staza i ukupnu duljinu vertikalnih segmenata
koji su u jednom rješenju. Dobrota je bolja što je vrijednost funkcije dobrote
manja.
Originalni
naslov:
„Genetic
Algorithm For Restrictive Channel Routing Problem“
Autori:
Vladimir N. Davidenko, Victor M.
Kureichik, Victor V. Miagkikh
Dostupan
na:
http://garage.cps.msu.edu/papers/GARAGe97-02-04.pdf
2.18. Za dizajn univerzalnog motora
Kao što je već ranije navedeno genetski algoritmi su „alati“ koji ne
zahtjevaju veliko inženjersko znanje kako bi dali dobre rezultate. To omogućuje
sam princip genetskih algoritama koji je zapravo jako prilagodljiv problemu.
Jedan od alata koji koristi genetske algoritme je GABSys (Genetic Algorithm-Bond Graph System), alat za sintezu više
dimenzionalnih dinamičkih sustava pomoću grafova ovisnosti. Ovdje je konkretno
prikazan dizajn dvotaktnog motora s unutarnjim izgaranjem dizajniranog pomoću
GABSys – a. Sve što inženjer mora napraviti je graf ovisnosti koji predaje
programu kao i zahtjeve koje sustav mora zadovoljiti koji se u programu predstavljaju
kao funkcija doborte.
Graf ovisnosti opisuje interakciju između dijelova sustava koristeći
simbole i linije.
Kromosomi su kodirani parametri dijelova sustava definirani grafom
ovisnosti. Konkretno za ovaj primjer motora postoji 15 parametera koji su
binarno kodirani pomoću 8 bitova(npr. radijus ulazne cijevi .01 - .256 m, može
poprimiti 28 različitih diskretnih vrijednosti). Tako zakodirani
parametri prolaze kroz genetski algoritam.
Kao primjer rada dizajnirana su dva motora, jedan od 8 ks i drugi od 20
ks s minimalnom potrošnjom goriva. Dakako da zobg malog broja parametara kao i
jednostavnog zahtjeva u funkciji dobrote (samo snaga) rezultati nisu bili optimalni
no primjer pokazuje kako su genetski algoritmi sposobni izgraditi ovakvu
strukturu koja uz odgovarajući broj parametara i dobro definiranu funkciju
dobrote može biti jako kvalitetno rješenje.
Originalni
naslov:
„GABSys: Using Genetic Algorithms to Breed a
Combustion Engine“
Autori:
B. Danielson, J. Foster, D Frincke
Dostupan
na:
http://www.csds.uidaho.edu/deb/bond-icec98.pdf
3. Problem trgovačkog putnika
3.1. Definicija problema
Definicija koja jako
dobro opisuje dani problem u njegovoj osnovnoj i najjednostavnijoj varijanti je
slijedeća definicija preuzeta iz [6]:
Za dan skup gradova i cijenu putovanja između svakog para gradova,
problem trgovačkog putnika (Traveling
Salesman Problem, TSP) mora pronaći najjeftiniji put koji će obići sve
gradove točno jednom i na kraju se vratiti u početni grad.
U ovom seminarskom radu
razmatra se ovakva definicija problema uz uvjet da je cijena putovanja od grada
A do grada B jednaka kao i cijena putovanja od grada B do grada A.
Iako je definicija vrlo
jednostavna i jasna problem je jako težak, čak štoviše spada u klasu NP -
teških problema. Točnije problem je faktorijalne složenosti što u prijevodu
znači da za 10 gradova broj mogućih rješenja iznosi 10! = 3,628,800. Ako se ide gledati za veći broj gradova, što su u
današnje vrijeme realne ture, 100 –
tinjak gradova, broj mogućih tura se penja na približno 9.3e157, što se metodom grube sile (brute force) uz današnju snagu računala ne može riješiti 3e144 godina uz pretpostavku da je broj
ruta koje današnje računalo može obraditi po sekundi jednak 1.000.000 [5].
Problem se osim gornje
definicije može proširiti dodavanjem različitih ograničenja gornjoj definiciji.
Tako je nastao i vremenski ovisan problem trgovačkog putnika, koji uz minimalnu
duljinu puta u obzir uzima i vrijeme koje je potrebno da se put obavi kao i
eventualne vremenski periodi u kojima se jedan dio posla mora napraviti [2]. Uz
ovu defniciju postoji još i asimetrični problem trgovačkog putnika u kojemu put
između grada A i grada B nije isti kao i pu između grada B i grada A [2]. Uz
ove definicije postoje još i mnoge druge, no njihovo objašnjavanje izlazi iz
opsega ovoga rada.
3.2. Genetski algoritmi i problem trgovačkog putnika
Iz definicije problema
vidi se da bi genetski algoritmi kao stohastička metoda za pretraživanje mogli
biti korisni u rješavanju problema. Zbog načina rada genetski algoritmi ne
pretražuju cijeli prostor rješenja već pomoću posebno definiranih operatora
križanja i mutacija evoluiraju rješenje. Za praktičnu primjenu genetski
algoritmi dobivaju još jedan plus zbog toga što u praksi nije nužno naći
optimalni put već je dovoljno dobar put i onaj koji je u okolici optimuma.
Također rad algoritma je moguće regulirati i usmjeravati podešavanjem
parametara koji su objašnjeni u poglavlju 4.
Uz sve ovo moguće je i
kombinirati genetske algoritme s metodama traženja lokalnog optimuma kako bi
pojedina jedinka što brže konvergirala prema svom optimumu koji je potencijalno
i globalni. Takvi se algoritmi nazivaju
hibridnima. Primjer hibridnosti koji je ovdje ostvaren je korištenje 2opt
metode kao operatora za mutaciju.
3.2.1. Prikaz kromosoma
Iako postoji
više mogućih načina prikaza za ovaj rad odabran je najintuitivniji prikaz koji
se može prikazati na slijedeći način:
( 0 , 1 , 3 , 5 , 4 , 6 , 2 , 7 )
U ovom prikazu postoji 8 gradova koje treba obići, a redosljed obilaska
je slijedeći: kreće se iz grada 0, pa u grad 1, nakon njega 3 itd. Dakle mjesto
u osmorki označava kada će taj grad biti posjećen. A broj koji je na tom mjestu
označava sam grad. Ukratko, gradovi su
poredani u smjeru u kojem se posjećuju. Ovaj način prikaza je uobičajen u
TSP implementacijama. [2,5]
Još jedan način prikaza
koji se koristi je matrični prikaz. Matrica je tipa n * n i to je zapravo
matrica susjedstva u grafu koji se dobiva povezivanjem svih gradova. Ako
postoji put iz grada A u grad B tada je na mjestu M[A,B] jedinica, inače je 0.
No zbog kompleksnosti on nije ovdje korišten, iako je po brzini izvođenja bolji
prkaz od ovdje korištenog i danas se ide u smjeru razvoja operatora za ovakav
način prikaza kromosoma. [2]
3.2.2. Funckija cilja
Funkcija
cilja je jednostavna forlmula koja zbraja udaljenosti između gradova, dajući
tako za svaki kromosom ukupnu dužinu puta. Naravno, što je dužina puta kraća,
kromosom je bolji i ima veću šansu za opstanak.
3.2.3. Operatori selekcije
Prirodna selekcija [4]
Iz početne se
populacije eliminira R = M x pe / 100 jedinki. Jedinke se
eliminiraju tako da se sačuva različitost populacije, odnosno eliminiraju se
slične jednike. Za početak cijela se populacija sortira prema dobroti. Nakon
toga se uspoređuje sličnost dobrota susjednih jedniki i ukoliko je njihova
razlika manja od predefiniranog malog realnog pozitivnog broja ε, eliminra
se jedna od n – torki. To se ponavlja dok je broj eliminiranih jedniki manji od
R. Ako je nakon ovog postupka broj eliminiranih jedinki i dalje manji od R
eliminiraju se jedinke s lošijom vrijednošću funkcije dobrote.
Turnirska selekcija [1,3]
Turnirska
selekcija je zapravo vrlo jednostavana. Iz cijelokupne populacije odabere se k
jedinki (k je veličina turnira, obično između 3 i 7) te se najlošija od njih
izbaci. Od ostatka jedniki slučajnim se odabirom odabiru dvije koje se onda
križaju i daju novu jedniku koja ulazi na mjesto stare u populaciju.
3.2.4. Operatori križanja
Partially matched crossover (PMX) [2,5]
PMX križanje je vrlo
jednostavno, a radi na slijedeći način:
U oba roditelja označe
se 2 točke prekida ( na slici 3.1 označene s | ), geni između tih točaka se zamijene u oba roditelja,što daje
slijedeće: 3 zamjenjuje 2, 8 zamjenjuje
4, 4 zamjenjuje 1 i obratno.
Sada se popunjava
ostatak kromosoma tako da se gradovi izvan točaka prekida vraćaju na svoje
mjesto ukoliko već ne postoje kao rezultat zamjene. U tom se slučaju na mjesto
grada koji postoji upisuje onaj kojeg mijenja novopridošli grad. Npr. kada se
nakon zamjene želi u prvo dijete staviti grad 1 on već postoji (novija jedinica
pridošla iz drugog kromosoma). Sada na mjesto jedinice dolazi 8 jer 4
zamjenjuje 1, a kako i 4 već postoji u kromosomu 8 zamjenjuje 4.
(2 5 1 | 3 8
4 | 7 6)
(8 6 7 | 2 4
1 | 3 5)
postaje
(3 5 8 | 2 4
1 | 7 8)
(1 6 7 | 3 8 4 | 2 5)
SLIKA 3.1 – PMX križanje
PMX križanje ima
problem jer želi populaciju odvući u lokalni optimum što se mora rješiti
korištenjem mutacije.
Greedy crossover [1]
Definicja Greedy
Crossover križanja je slijedeća:
„Greedy Crossover uzima prvi grad iz jednog roditelja, uspoređuje
gradove u koje se dolazi iz tog grada u oba roditelja te uzima onog čiji je put
kraći. Ako se je jedan grad već pojavio u djetetu tada se uzima drugi. Ako su
oba u djetetu tada se slučajnim odabirom odabire jedan neodabrani grad.“
Ovo križanje je jako
efikasno i brzo skraćuje ture.
Greedy subtour crossover (GSX) [4]
Ovo križanje radi tako
da iz oba roditelja uzima što je moguće dulji podskup gradova iz oba roditelja
na način koji je prikazan na slici 3.2. Na taj je način najbolje sačuvan
genetski materijal roditelja. To zapravo znači slijedeće, ako postoje dva
kromosma koja oba sadržavaju podskupove optimalne ture, ovim križanjem se može
vrlo brzo doći do spajanja tih dijelova što naravno dovodi do brže
konvergencije samog problema.
ulaz: kromosom ka = (a0,a1,...,
an-1) i kb = (b0,b1,..., bn-1)
izlaz: dijete k
procedura krizaj (ka,kb){
fa <- true
fb <- true
izaberi jedan
slucajan grad g
izaberi x gdje
je ax = t
izaberi y gdje
je by = t
k <- t
čini{
x
= (x – 1) mod n
y
= (y - 1) mod n
ako fa = true onda{
ako
ax nije u k onda
k <- ax * k
inače
fa <- false
}
ako fb = true onda{
ako by nije u k onda
k
<- k * by
inače
fb <- false
}
} dok fa = true ili fa
= true
ako staza nije potpuna onda
dodaj
ostale gradove slucajnim redosljedom u k
vrati k
}
SLIKA 3.2 – Pseudokod GSX algoritma, n je broj gradova, a * je znak
konkatenacije nizova
Od ovdje opisanih ovo je najefikasnija vrsta križanja.
3.2.5. Operatori mutacije
Jednostavna mutacija [1]
Kao što
joj i ime kaže jednostavna mutacija radi tako da uzme dva slučajno odabrana
grada u kromosomu i zamjeni njihova mjesta. Na slici 3.3 je prikazana zamjena 5
i 1.
(3 5 4 2 6 1
7 8)
postaje
(3 1 4 2 6 5
7 8)
SLIKA 3.3
– Jednostavna mutacija
Greedy swap mutacija [1]
Ova mutacija je u
potpunosti ista kao i jednostavna no uz jedan dodatni uvjet. Do zamjene
kromosoma dolazi samo ako je tura dobivena mutacijom kraća od one prije
mutacije.
2opt metoda[4]
Ova metoda je jedna od
najpoznatijih metoda lokalnog pretraživanja
u algoritmima koji rješavaju problem trgovačkog putnika. Unapređuje turu
brid po brid i okrećući poredak gradova u podturi. Algoritam je prikazan na
slici 3.4, a detaljniji rad algoritma opisuje slijedeći primjer: zamislimo si
put od grada A do grada B i put od grada C do grada D. Uspoređuje se da li je
AB + CD > AC + BD. Ako je, dolazi do zamjene kao što je to prikazano na
slici 3.4. To se ponavlja dok je god moguće skratiti turu. Korištenje ovog operatora unosi hibridnost u
implementaciju s obzirom na to da je ovo klasična metoda pretraživanja. Velik
problem 2opt metode je zapinjanje u lokalnom optimumu iz kojeg se na može
izvući zobg načina usporedbe. Zato su tu opertari križanja koji unose dovoljnu
raznolikost kako bi 2opt metoda konvergirala sve do globalnog optimuma. Na
usprkos ovog ograničenja ovo je daleko najbolji operator mutacije što se vidi i
u poglavlju 4.2 gdje se radi usporedba ovdje opisanih operatora.
SLIKA 3.4 – 2opt metoda
4.
Praktični rad
4.1. Rad s aplikacijom
Aplikacija kao i
izvorni kod dostupni su na CD – u uz ovaj rad. Programski jezik kroišten za
implementaciju ovog algoritma je C#.
Rad s apliakcijom se
može predstaviti pomoću slijedećeg dijagrama toka
SLIKA 4.1 – Dijagram toka korištenja programa
Učitavanje udaljenosti
vrši se na dva načina. Prvi je učitavanje parametara iz XML datkoteke formata
prikazanog na slici 4.2. Prilikom ove vrste učitavanja programu su potrebne
dvije vrste podataka. Prva je broj gradova, a druga su koordinate svih gradova.
Ova vrsta učitavanja je
kompatiblina s velikom kolekcijom gotovih problema dostupnih na Webu.
Drugi način učitavanja
točaka je jednostavno postavljanje točaka mišem po ekranu nakon kojeg pritiskom
na tipku „učitavanje udaljenosti“ program sam odredi koordnate postavljenih
točaka.
<TSP>
<info>
<brojGradova>4</brojGradova>
</info>
<tocke>
<t0>0 3</t0>
<t1>1 0</t1>
<t2>2
7</t2>
<t3>1
0</t3>
</tocke>
</TSP>
SLIKA 4.2 – Zapis ulazne datoteke
Unutar tag-ova <brojGradova> upiše se veličina problema, dok se unutar tag-ova <tocke> upisuju koordinate gradova
(x i y koordinata).
Nakon što se učitaju udaljenosti slijedi postavljanje
raznih vrsta parametra, od vrsta genetsikh operatora do ograničenja za te
operatore. Parametri koji se mogu postvljati su slijedeći:
-
veličina populacije
-
uvjet zaustavljanja – može biti ili broj
generacija ili broj generacija koji mora proći
s istom najboljom jedinkom
-
vrsta selekcije, zajedno s odgovarajućim
parametrima. Kod prirodne selekcije to
su vjerojatnost selekcije i epsilon, dok su kod turnira to vjerojatnost selekcije
i veličina turnira.
-
vrsta križanja, ovdje je bitno reći da je
vjerojatnost križanja jednaka vjerojatnosti
slekcije zobg načina na koji selekcije djeluju na populaciju.
-
vrsta mutacije i vjerojatnost mutacije.
Nakon postavljenih parametara algoritam može započeti s
radom, a sama kontrola rada vrši se s tipkama „start“, „stop“ i „reset“.
Pritiskom na tipku „start“ pokreće se rad algoritma, pritiskom na tipku „stop“
rad se zaustavlja, no problem ostaje učitan što omogućuje korisniku ponovno rješavanje
problema s novim ili istim parametrima. Tipka „reset“ služi za poništavanje
svih vrijednosti, od parametara do učitanog problema.
4.2. Rezultati i usporedbe rada genetskih operatora
Računalo na kojem su izvođeni testovi je Intel Pentium IV 450 MHz s 256 MB RAMa pod Microsoft Windows XP SP2 operativnim sustavom s .NET Frameworkom 1.1.
Nakon niza testova s različitim parametrima
pokazalo se da je najbolja kombinacija operatora slijedeća:
-
prirodna selekcija
-
Greedy Subtour
crossover
-
2opt meoda
za mutaciju
Korištenjem ovih
operatora algoritam je svaki puta došao do optimalnog rješenja i to svega u par
generacija. Problemi koji su korišteni za prikaza rada algoritma su bayg29 i att48. To su standardni
problemi za testiranje rada aplikacija koje rješavaju problem trgovačkog
putnika čija je optimalna ruta poznata, a njihove XML datoteke su dostupne uz
izvorni kod programa, kao i optimalne rute.
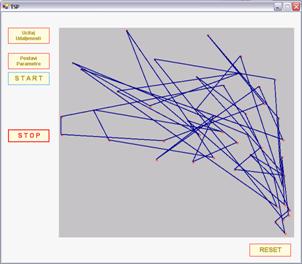
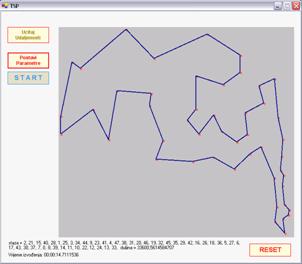
SLIKA 4.3 – rezultati izvođenja algoritma korištenjem predefiniranih
postavki, lijevo je početno stanje, a desno je optimalna ruta. Testni problem
je att48.
Vrijeme potrebno za
pronalazak optimalne rute uz predefinirane postavke je 14.711 sekundi, uzeto
kao srednje vrijeme 5 izvođenja s istim postavkama. Postignuto je optimalno
rješenje uz brzu konvergenciju ka njemu. Optimalna ruta nalazi se u datoteci att48.opt.tour.
SLIKA 4.4 – Konvergencija rješenja, crvenim slovima su prikazane
najkraća udaljenost kao i generacija u kojoj je postignuta ta udaljenost
Graf na slici 4.4 treba
uzeti s rezervom zbog prirode genetskih algoritama, odnosno zbog načina na koji
oni dolaze do rješenjena. Koji put će prije konvergirati ka rješenju, a koji
put kasnije.
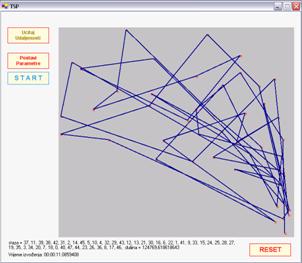
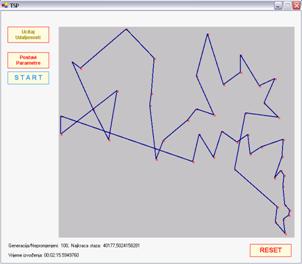
SLIKA 4.5 – „Optimalna“ ruta nakon 100 generacija određena korištenjem
prirodne selekcije, PMX križanja i jednostavne mutacije i predefiniranih
postavki.
Kao što se vidi iz
slike 4.5 rezultati korištenjem prirodne selekcije, PMX križanja i jednostavne
mutacije uz predefinirane postavke znatno su lošiji nego oni korištenjem
operatora sa slike 4.3. Duljina staze je 124.769 što je 4 puta lošije rješenje
od optimalnog.
Uz promjenu parametra,
to jest uz njihovo postavljanje na agresivnije postavke postignuti su slijedeći
rezultati.
SLIKA 4.6 – Konvergencija s promjenjenim parametrima
Postavke parametara su
slijedeće:
-
broj generacija = 1000
-
vjerojatnost križanja = 55 %
-
epsilon = 200
-
vjerojatnost mutacije = 35 %
Ostali parametri su nepromjenjeni. Uz ove postavke vrijeme izvođenja
algoritam penje se na preko dvije minute, rezultat je duplo bolji od prethodnog
i iznosi 59600, što je još uvijek duplo lošije od optimalnog rješenja
postignutog korištenjem predefiniranih postavki.
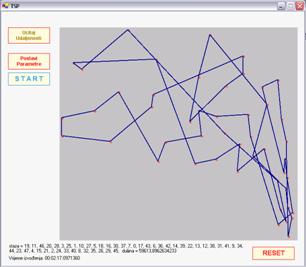
Na slici 4.7 korištena
je turnirska selekcija, greedy crossover križanje i greedy swap mutacija.
Korišteni parametri su i u ova dva slučaja predefinirani. Vrijeme izvođenja
algoritam bilo je nešto manje od dvije i pol minute. Duljina puta koja je pri
tome postignuta iznosi 40177 što je usporedivo s optimalnom rutom.
SLIKA 4.7 – Optimalna ruta nakon 100 generacija korištenjem turnira
veličine 5, greedy croosover križanja i greedy swap mutacije
Uz malo agresivinije postavke parametara ili povećanje broja generacija
došlo bi se i do optimalne rute. Iz ova četiri primjera vidljivo je kako se za
različite operatore i za različite postavke parametara algoritam potpuno
drugačije ponaša. Iz toga se vidi velika važnost svih komponenti koje čine
genetski algoritam i koliko je važno da se svakom dijeli algoritma pri dizajnu
dodjeli jednaka pažnja kako bi on davao što bolje rezultate.
Direktne usporedbe rada pojedinih genetskih operatora iste namjene
Za ove usporedbe korišten je problem bayg29, čija je datoteka, zajedno s
optimalnom turom također dostupna uz aplikaciju. Ove usporedbe su rađene tako
da se jedna vrsta operatora mijenja dok druga dva ostaju konstanta kao bi se
direktno moglo vidjeti kako pojedini operator djeluje na rad algoritma, što
vremenski, što gledajući konvergenciju problema. Parametri algoritma su
postavljeni na predefinirane vrijednosti.
Prva usporedba je usporedba prirodne
selekcije i turnirske selekcije. Operator križanja je GSX, a operator mutacije
je Greedy Swap mutacija. Duljina optimalne rute iznosi 9074. Bitno je napomenuti da bu uz druge
operatore križanja i selekcije rezultati bili drugačiji, moguća su znatna
odsutpanja od ovdje prikazanih. Razlog zašto nisu rađene sve međusobne
usporedbe operatora je broj mogućih
kombinaicja, koji je 18.
|
|
Vrijeme izvođenja |
Duljina ture |
|
Prirodna selekcija |
8,5 sekundi |
13594 |
|
Turnirska selekcija |
58 sekundi |
10358 |
SLIKA 4.8 – Usporedba
operatora selekcije
Iz slike 4.8
se vidi kako je prirodna selekcija puno brži operator, no daje slabije
rezultate, dok su turniri znatno sporiji iako daju rezultata koji je znatno
bliži optimumu.
|
|
Vrijeme izvođenja |
Duljina ture |
|
GSX križanje |
5,8 sekundi |
13016 |
|
Greedy Crossover |
7,6 sekundi |
9854 |
|
PMX križanje |
4,9 sekundi |
16864 |
SLIKA 4.9 – Usporedba
operatora križanja
Iz slike 4.9
vidi se kako je korištenje greedy crossover – a dalo najbolji rezultat uz
srednji potrošak vremena. PMX križanje, iako je najbrže dalo je jako loš
rezultat, odnosno brzo je zaglavilo u lokalnom optimumu iz koje se nije moglo
izvući. GSX križanje je brzo, a daje i srednji rezultat zbog čega je u
kombinaciji s 2opt metodom najbolja postavka algoritma što se pokazalo kroz
dodtna testiranja. Korištena je prirodan selekicja i Greedy Swap mutacija.
|
|
Vrijeme izvođenja |
Duljina ture |
|
Jednostavna mutacija |
5,9 sekundi |
15500 |
|
Greedy Swap mutacija |
6,3 sekunde |
15800 |
|
2opt metoda |
4,99 sekunde |
9074 |
SLIKA 4.10 – usporedba
operatora mutacije
Slika 4.10
pokazuje kako je 2opt metoda daleko najbolji operator mutacije i vremeski i po
rezultatu, već u trećoj generaciji je pronađen globalni optimum. No to niti ne
začuđuje zbog načina na koji 2opt metoda vrši pretraživanje. Troši malo
procesorskog vremena, a unapređuje rutu dok je to god moguće. Druge dvije
mutacije daju usporedive rezultate što je isto tako očekivano s obzirm na
njihove načine rada koji su jako slični. Selekcija je i u ovom slučaju
prirodna, dok je za križanje korišten GSX.
Vremenske testove treba treba uzeti s
određenom rezervom zbog toga što se jedan dio vremena troši na crtanje svake
nove najbolje rute dok algoritam traži
optimalno rješenje. Nasuprot toga rezultati vezani uz pronalaske „optimalnih“
ruta su puno realniji te se kroz njih vidi kako je koji operator dobar. Naravno
uz promjene parametara neki durgi operatori mogu postati bolji. Sve zavisi od
problema koji se rješava. Također, određene komibnacije operatora daju odlične
rezultate dok pak neke druge kombinacije daju jako loše rezultate.
Zaključak
Kroz opise
primjena genetskih algoritama vidi se kako je njihova primjena već vrlo široka
i kako postoje razne varijante genetskih algoritama, svaka varijanta za svoj
problem. Iz toga se može izvući još jedan zaključak o genetskim algoritmima, a
to je da su oni zapravo samo princip, ideja, smjernica kako neki problem
rješiti na drugačiji način od klasičnih metoda, jer je sve na korisniku da se
sam odluči da li će razvijati svoj vlastiti algoritam ili će probati svoj
problem prilagoditi već nekom postojećem algoritmu koji rješava neku sličnu klasu
problema.
Također, vidi se da su
genetski algoritmi korisni za one klase problema koje se ne mogu rješiti na
klasične načine. Iako po brzini nisu u vrhu, po veličini područja koje
pretražuju su vjerovatno daleko bolji od svih ostalih metoda. To se jako dobro
vidi na primjeru problema trgovačkog putnika, čiji je prostor rješenja ogroman
već i za stotinjak gradova.
Praktični rad je
pokazao kako je jedna od najbitnijih stvari za uspješan rad algoritma ispravan
odabir genetskih operatora kao i parametara koji će odrediti ponašanje tih
operatora. Ako se oni ispravno odrede algoritam daje fantastične rezultate, no
ako se je nijhov odabir nesmotren algoritam će najvjerojatnije završiti rad u
nekom lokalnom optimumu, bliže ili dalje od pravog optimuma, ovisno o
parametrima.
Literatura
[1]
Konstantin Boukreev. “Genetic Algorithm and Traveling Salesman Problem”,
http://www.generation5.org/content/2001/tspapp.asp,
2001.
[2]
Kylie
Bryant, Arthur Benjamin. “Genetic
Algorithms and the Traveling Salesman Problem”,
http://www.math.hmc.edu/seniorthesis/archives/2001/kbryant/kbryant-2001-thesis.pdf,
2000.
[3]
Marin
Golub, doc. dr.sc. “Genetski algoritam”,
http://www.zemirs.fer.hr/~golub/ga.html,
2004.
[4]
Hiroaki
Sengoku, Ikua Yoshihara. “A Fast TSP
Solver Using GA on Java”
http://www.gcd.org/sengoku/docs/arob98.pdf,
1998.
[5]
Andy
Thomas. “Solving The Travelling Sales Man
Problem Using Genetic Algorithm”, http://www.generation5.org/content/2001/ga_tsp.asp,
2001.
[6]
http://www.tsp.gatech.edu/problem/index.html