U ovoj vježbi ćemo ponoviti osnove strojnog učenja, podsjetiti se na optimizaciju gradijentnim spustom te upoznati se s mogućnostima Pythona, Numpyja i Matplotliba. Razvit ćemo pythonske implementacije binarne i višerazredne logističke regresije utemeljene na Numpyjevim primitivima. Ispitat ćemo svojstva naše implementacije analizom numeričkih pokazatelja uspješnosti klasifikacije te iscrtavanjem funkcije odluke primjenom Matplotliba. Cilj vježbe je ponoviti osnovna znanja s prethodnih kolegija te razviti intuiciju koja će nam biti dragocjena pri oblikovanju i debuggiranju dubokih modela strojnog učenja.
U okviru vježbe razvit ćemo tri pythonska modula:
data, binlogreg
i logreg.
Modul data će sadržavati operacije
vezane uz stvaranje i iscrtavanje skupa slučajnih 2D podataka
te operacije vezane uz evaluaciju klasifikacijske performanse.
Taj modul ćemo koristiti i u prvoj vježbi
gdje ćemo na istim podatcima usporediti
duboko učenje sa SVM-om kao prvim izborom
u mnogim klasifikacijskim problemima.
Preostala dva modula će sadržavati funkcije i testove
za binarnu i višerazrednu logističku regresiju.
Deriviranje vektorskih i skalarnih funkcija više varijabli je ključni koncepti za shvaćanje gradijentne optimizacije parametara modela strojnog učenja i zato ga moramo dobro poznavati. Po definiciji, parcijalna derivacija funkcije više varijabli jest derivacija s obzirom na jednu od tih varijabli pod pretpostavkom da su sve ostale varijable konstantne. Parcijalne derivacije vektorskih funkcija možemo računati odvojeno za svaku komponentu funkcije.
Ilustrirajmo ove pojmove na primjeru sljedeće vektorske funkcije vektorske varijable:
\( \mathbf{f}(\mathbf{x})= \left[ \begin{matrix} x_1^2 + x_2 x_3\\ x_1 + x_2 + x_3\\ \end{matrix} \right] \)
Parcijalna derivacija prve komponente funkcije \(\mathbf{f}\) po drugoj komponenti argumenta \(\mathbf{x}\) odgovara izrazu: \( \partial f_1/\partial x_2 = x_3 \) . Parcijalna derivacija druge komponente funkcije po prvoj komponenti argumenta odgovara izrazu: \( \partial f_2/\partial x_1 = 1 \) .
Skup svih parcijalnih derivacija vektorske funkcije vektorske varijable možemo izraziti Jakobijevom matricom (ili, kraće, Jakobijanom). Retci Jakobijana odgovaraju komponentama vektorske funkcije, dok stupci odgovaraju komponentama nezavisne varijable. Tako npr. Jakobijan skalarne funkcije D-dimenzionalne vektorske varijable ima jedan redak i D stupaca, dok Jakobijan funkcije sinus ima jedan redak i jedan stupac. Po istoj logici, Jakobijan funkcije \(\mathbf{f}\) imao bi dva retka i tri stupca:
\( \mathbf{f}'(\mathbf{x}) = \frac{d \mathbf{f}}{d \mathbf{x}} = \left[ \begin{matrix} \frac{\partial f_1}{\partial x_1} & \frac{\partial f_1}{\partial x_2} & \frac{\partial f_1}{\partial x_3} \\ \frac{\partial f_2}{\partial x_1} & \frac{\partial f_2}{\partial x_2} & \frac{\partial f_2}{\partial x_3} \end{matrix} \right] = \left[ \begin{matrix} 2x_1 & x_3 & x_2 \\ 1 & 1 & 1 \end{matrix} \right] \)
Često će nam biti interesantne matrice parcijalnih derivacija obzirom na samo neke od nezavisnih varijabli promatrane funkcije. Primjerice, ako kažemo da vektor \(\mathbf{q}\) sadrži prve dvije komponente vektora \(\mathbf{x}\) (tj. da vrijedi \(\mathbf{q}=[x_1 x_2]^\top\)), onda možemo pisati:
\( \mathbf{f}'(\mathbf{q}) = \left[ \begin{matrix} \frac{\partial f_1}{\partial x_1} & \frac{\partial f_1}{\partial x_2} \\ \frac{\partial f_2}{\partial x_1} & \frac{\partial f_2}{\partial x_2} \end{matrix} \right] = \left[ \begin{matrix} 2x_1 & x_3 \\ 1 & 1 \end{matrix} \right] \)
Pretpostavimo sada da naša funkcija \(\mathbf{f}\) nema izravan kontakt s nezavisnom varijablom, nego da na nju djeluje posredno, preko funkcije \(\mathbf{g}\). Rezultantna funkcija \(\mathbf{F}\) odgovara kompoziciji funkcija \(\mathbf{f}\) i \(\mathbf{g}\):
\( \mathbf{F}(\mathbf{x}) = ( \mathbf{f} \circ \mathbf{g} ) (\mathbf{x}) = \mathbf{f}( \mathbf{g}(\mathbf{x}) ) \)
Neka je funkcija \(\mathbf{g}\) zadana kako slijedi:
\( \mathbf{g}(\mathbf{x}) = \left[ \begin{matrix} \sin(x_1) \\ x_2^3 + x_1 x_2\\ x_3 \end{matrix} \right] \)
Pretpostavimo da želimo odrediti derivaciju kompozicije funkcija \(\mathbf{F}\). U pomoć nam priskače pravilo ulančavanja vektorskih funkcija koje u općenitom obliku glasi:
\( \mathbf{F}'(\mathbf{x}) = \mathbf{f}'(\mathbf{g}(\mathbf{x})) \cdot \mathbf{g}'(\mathbf{x}) \)
Kad pravilo ulančavanja primijenimo na naš konkretni primjer, Jakobijevu matricu funkcije \(\mathbf{F}\) dobivamo sljedećim izvodom:
\( \mathbf{F}'(\mathbf{x}) = \mathbf{f}'(\mathbf{g}(\mathbf{x})) \cdot \mathbf{g}'(\mathbf{x}) = \left[ \begin{matrix} 2g_1(\mathbf{x}) & g_3(\mathbf{x}) & g_2(\mathbf{x}) \\ 1 & 1 & 1 \end{matrix} \right] \cdot \left[ \begin{matrix} \cos(x_1) & 0 & 0\\ x_2 & x_1+3x_2^2 & 0\\ 0 & 0 & 1 \end{matrix} \right] \)
\( \mathbf{F}'(\mathbf{x}) = \left[ \begin{matrix} 2\sin(x_1) & x_3 & x_2^3 + x_1 x_2 \\ 1 & 1 & 1 \end{matrix} \right] \cdot \left[ \begin{matrix} \cos(x_1) & 0 & 0\\ x_2 & x_1+3x_2^2 & 0\\ 0 & 0 & 1 \end{matrix} \right] \)
\( \mathbf{F}'(\mathbf{x}) = \left[ \begin{matrix} 2\sin(x_1)\cos(x_1) + x_2 x_3 & x_1 x_3 + 3 x_2^2 x_3 & x_2^3 + x_1 x_2 \\ \cos(x_1) + x_2 & x_1+3x_2^2 & 1 \end{matrix} \right] \)
U strojnom učenju posebno često analiziramo svojstva skalarnih funkcija više varijabli, a tipičan primjer je optimiranje funkcije gubitka o kojoj ćemo više pričati u odjeljcima 0c i 0d. Ako je funkcija više varijabli skalarna (tj. ima samo jednu komponentu), tada gradijent te funkcije sadrži parcijalne derivacije po svim varijablama. Ako gradijent promatramo kao "obični" stupčani vektor (konvencije se razlikuju, ali to je najčešće slučaj), gradijent će odgovarati transponiranoj Jakobijevoj matrici:
\( \nabla f(\mathbf{x}) = \frac{d f(\mathbf{x})}{d \mathbf{x}}^\top \).
Ako funkciju \(f\) aproksimiramo Taylorovim razvojem prvog reda, dobivamo aproksimaciju:
\( f(\mathbf{x} + \Delta \mathbf{x}) \approx f(\mathbf{x}) + \frac{d f(\mathbf{x})}{d \mathbf{x}} \Delta \mathbf{x} = f(\mathbf{x}) + \nabla f(\mathbf{x})^\top \Delta \mathbf{x} \).
Pogledajmo što se zbiva kad u tu aproksimaciju uvrstimo pomak u smjeru negativnog gradijenta:
\(\Delta \mathbf{x} = - \epsilon\cdot \mathbf{g}, \; \mathbf{g}= \nabla f(\mathbf{x}) \).
Ako Taylorova aproksimacija vrijedi, vrijednost funkcije \(f\) bi trebala opadati:
\( f(\mathbf{x} - \epsilon\cdot\mathbf{g}) \approx f(\mathbf{x}) - \epsilon\cdot \mathbf{g}^\top \mathbf{g} < f(\mathbf{x})\;. \)
Vidimo da iterativno pomicanje u smjeru negativnog gradijenta može dovesti do lokalnog minimuma funkcije \(f\). To je najjednostavnija metoda gradijentne optimizacije, a poznata je pod nazivom gradijentni spust. U praksi, aproksimacija će biti tim točnija što je hiper-parametar \(\epsilon\) manji. Međutim, nije dobro da \(\epsilon\) bude premali kako učenje ne bi previše trajalo. Zbog toga su smišljene brojne poboljšane metode, a neke od njih ćemo upoznati na predavanjima.
Strojno učenje proučava izradu programskih komponenata
koje elemente svoje funkcionalnosti mogu naučiti na podatcima.
Pretpostavimo da na ulazu našeg potprograma dobivamo
D-dimenzionalni podatak \(\mathbf{x}\)
koji može biti točka ravnine (D=2),
siva slika dimenzija 28x28 (D=784) ili nešto treće.
Pretpostavimo dalje da naš potprogram ulazni podatak treba
svrstati u jedan od C razreda (ili klasa).
Drugim riječima, naš potprogram na izlazu treba proizvesti
predikciju \(y\) koja odgovara
indeksu razreda ulaznog podatka (vrijedi \(1\le y\le C\)).
U slučaju da je naš potprogram element sustava
za raspoznavanje brojeva na skeniranim uplatnicama,
razredi bi bili znamenke od 0 do 9.
Razredi podataka na sljedećoj slici
bili bi: 3, 1, 3, 4, 7, 2, itd:
Kad bi naš zadatak bio raspoznati prometnu signalizaciju
u sustavu za sigurnosnu inspekciju prometnica,
razredi bi bili standardne oznake prometnih znakova
(npr. A03, A04, A05, A33, B31 itd.)
kao što to ilustrira sljedeća slika:

Postavlja se pitanje kako organizirati računalni program koji treba podržati učenje na primjerima označenih podataka. Principijelan prvi korak u tom smjeru jest izraziti dio programa koji treba učiti u obliku matematičke funkcije sa slobodnim parametrima. Tu funkciju nazivat ćemo modelom. Možda najjednostavniji model za naš konkretni primjer je:
\(y = argmax(\mathbf{W}\cdot\mathbf{x}+\mathbf{b})\).
Slobodni parametri tog modela su \(\mathbf{W}\) i \(\mathbf{b}\). Pri tome \(\mathbf{W}\) predstavlja matricu \(\mathrm{C}\times \mathrm{D}\), \(\mathbf{b}\) je vektor \(\mathrm{C}\times \mathrm{1}\), dok \(\cdot\) označava matrično množenje. Intuitivno, takav model ulazni podatak \(\mathbf{x}\) uspoređuje sa svakim od C redaka matrice \(\mathbf{W}\) (skalarni produkt se pod nekim uvjetima može promatrati kao usporedba), te podatak svrstavamo u razred definiran indeksom retka koji je "najsličniji" podatku. U praksi ćemo koristiti diferencijalne varijante tog modela koje će omogućiti učenje gradijentnim spustom o kojem smo pričali u odjeljku 0b.
Da bismo model naučili, trebaju nam još dva koncepta: gubitak i optimizacijski postupak. Gubitak je funkcija koja kaže koliko se dobro predikcije modela poklapaju sa podatcima za učenje. Optimizacijski postupak "štima" parametre tako da gubitak na skupu za učenje bude što manji.
Formalno, algoritam strojnog učenja definiran je modelom, gubitkom i optimizacijskim postupkom. Npr. kod logističke regresije koju ćemo detaljno upoznati u sljedećem odjeljku (0d) imamo:
Višerazredna logistička regresija [1] podrazumijeva probabilistički diskriminativni klasifikacijski model pripadnosti vektorskog podatka \(\mathbf{x}\) razredima \(c_j, j=0, 1, ..., C-1\). Radi se o generaliziranom linearnom modelu koji afinu transformaciju podataka spljošćuje (engl. squash) na vjerojatnosni interval [0,1]. Ishod klasifikacije formalno prikazujemo slučajnom varijablom \(Y\) za koju vrijedi \(\sum_j P(Y=c_j|\mathbf{x}) = 1 \; \forall \mathbf{x}\).
U binarnom slučaju podatak može pripadati jednom od samo dvaju razreda (\(C=2\)). Parametri modela tada su vektor \(\mathbf{w}\) te pomak \(b\), a rezultat modela su aposteriorne vjerojatnosti razreda \(c_0\) i \(c_1\):
\( P(Y=c_1|\mathbf{x}) = σ(\mathbf{w}^\top\mathbf{x} + b), \mathrm{\ gdje\ je\ } σ(s)=e^s/(1+e^s) \\ P(Y=c_0|\mathbf{x}) = 1 - P(c_1|\mathbf{x}) \)
Pri tome podatci \(\mathbf{x}\) imaju dimenzije Dx1, parametar \(\mathbf{w}\) ima dimenzije Dx1, dok je parametar \(b\) skalar.
Kad podatke klasificiramo u C razreda, model možemo sažeto formulirati sljedećim skupom jednadžbi (funkciju softmax ćemo objasniti u nastavku):
\(
P(Y=c_j|\mathbf{x}) = \mathrm{softmax}(j,
\mathbf{W} · \mathbf{x} + \mathbf{b}),
j = 0, 1, ..., C-1.
\)
Matrice \(\mathbf{W}\) i \(\mathbf{b}\) sadrže parametre postupka, a njihove dimenzije su CxD odnosno Cx1. Pri tome D predstavlja dimenzionalnost podataka, dok je C broj razreda. Vektor \(\mathbf{s}=\mathbf{W}·\mathbf{x}+\mathbf{b}\) ima dimenzije Cx1 te sadrži tzv. klasifikacijske mjere razreda (možemo koristiti i prijevod klasifikacijski rezultat, engl. classification scores). Klasifikacijske mjere pokazuju koliko je odgovarajući razred vjerojatniji (odnosno manje vjerojatan) u odnosu na druge razrede. Konačno, aposteriorne vjerojatnosti razreda dobivamo funkcijom softmax čija j-ta komponenta odgovara izrazu: \( \mathrm{softmax}(j, \mathbf{s}) = e^{s_j}/\sum_k e^{s_k} . \)
Ako detaljnije razmotrimo definiciju funkcije softmax, primijetit ćemo da su klasifikacijske mjere redundantne: kad svakoj od njih dodamo istu konstantu funkcija softmax na izlazu daje istu razdiobu. Iz toga slijedi da jednu od C klasifikacijskih mjera bez smanjenja općenitosti možemo fiksirati postavljanjem odgovarajućeg retka parametara na nulu (\(\mathbf{W}_{j,:}=b_{j}=0\) ). Tako normalizirane klasifikacijske mjere mogu se interpretirati kao logaritmi omjera šansi promatranog razreda u odnosu na fiksirani razred. U praksi se pokazuje da postupak jednako dobro konvergira i ako optimiramo sve retke \(\mathbf{W}\) i \(\mathbf{b}\). Stoga u implementaciji često optimiramo sve parametre jer se tako dobiva nešto jednostavniji programski kod. Međutim, redundantnost ulaza softmaksa u pravilu koristimo kako bismo izbjegli da eksponenciranje velikih klasifikacijskih mjera rezultira numeričkim preljevom. Primjer takve implementacije donosimo u nastavku:
# stabilni softmax
def stable_softmax(x):
exp_x_shifted = np.exp(x - np.max(x))
probs = exp_x_shifted / np.sum(exp_x_shifted)
return probs
Obratite pažnju da prikazani primjer funkcionira samo ako mu se kao ulazni argument pošalje tenzor prvog reda (vektor). U vježbi ćete takvu proceduru trebati primijeniti na matricu \(N\times C\) u kojoj će svaki redak sadržavati klasifikacijske mjere odgovarajućeg podatka. Pokušajte to ostvariti bez eksplicitne petlje.
Parametre logističke regresije \(\mathbf{W}\) i \(\mathbf{b}\) određujemo optimiranjem funkcije gubitka \(\mathcal{L}(\mathbf{W},\mathbf{b})\) na skupu za učenje \(\mathcal{D}\). Skup za učenje tipično se sastoji od parova podataka i odgovarajućih oznaka razreda \(\mathcal{D}= \{(\mathbf{x_i},y_i), i = 1, 2, ..., N\}\). Ovo je najjednostavnije pojmiti na problemu klasifikacije 2D podataka u C različitih razreda. U tom slučaju \(\mathbf{x_i}\) su elementi ravnine, dok su \(y_i\) elementi cjelobrojnog intervala između 0 i C-1. Gubitak logističke regresije odgovara prosječnoj negativnoj log-izglednosti (eng. negative log-likelihood, NLL) preko svih podataka:
\( \mathcal{L}_\mathrm{NLL} (\mathbf{W},\mathbf{b}|\mathcal{D}) = - \frac{1}{N} \sum_i \log P(Y=y_i|\mathbf{x}_i)\;. \)
Obratite pažnju na to da \(P(Y=y_i|\mathbf{x}_i)\) označava vjerojatnost kojom model podatak \(\mathbf{x}_i\) klasificira u točan razred \(y_i\). Ovako izražen gubitak favorizira parametre \(\mathbf{W}\) i \(\mathbf{b}\) koji točnim oznakama podataka za učenje pridružuju što veće vjerojatnosti. U praksi ništa nas ne sprječava da umjesto negativne log-izglednosti parametara optimiramo neki drugi gubitak. Međutim, negativna log-izglednost vrlo dobro funkcionira u praksi te je zbog toga često metoda izbora kod učenja na čvrstim oznakama.
Nažalost, postoje i podatci koji nisu pogodni za označavanje čvrstim oznakama odnosno jednojediničnim kodovima. Kao primjer možemo zamisliti sliku smeđe životinje sa šiljatim ušima u visokoj travi. Ako označivač nije siguran radi li se o mački, lisici ili psu, oznaku je najprikladnije izraziti distribucijom tako da modovi odgovaraju vjerojatnim razredima. Prethodno uveden gubitak negativne log izglednosti u ovom slučaju neće biti primjenljiv jer sada umjesto indeksa točnog razreda \(y_i\) imamo mekane oznake koje predstavljaju kategoričke distribucije preko C razreda: \(Y_i=[y_{ij}]_{j=1}^C\). Gubitak sada možemo izraziti otežanim prosjekom negativne log-izglednosti preko mehih oznaka \(Y_i\):
\( \mathcal{L}_\mathrm{CE} (\mathbf{W},\mathbf{b}|\mathcal{D}) = - \frac{1}{N} \sum_i \sum_j y_{ij} \cdot \log P(Y=y_{ij}|\mathbf{x}_i)\;. \)
Pokazuje se da ovaj izraz odgovara prosječnoj unakrsnoj entropiji (eng. cross entropy, CE) između točne i prediktirane distribucije po svim podatcima (provjerite to za vježbu!).
Primijetite da naše jednadžbe izražavaju prosječni gubitak preko svih viđenih podataka. Takva formulacija gubitka olakšava praćenje napredovanja učenja i dijagnosticiranje problema zbog izravne veze s prosječnom točnosti predikcija. Početni klasifikacijski gubitak na skupu s 10 razreda (CIFAR-10, MNIST) tipično će biti 2.3 (razmislite zašto!) Dodatno, apsolutni iznos gradijenata ne ovisi o broju podataka (odnosno o veličini mini-grupe), a to značajno olakšava ugađanje hiper-parametara postupka. Zbog toga ćemo u praksi uvijek koristiti usrednjeni ukupni gubitak umjesto akumuliranog ukupnog gubitka.
Nažalost, optimiranje parametara logističke regresije ne možemo provesti u zatvorenom obliku, nego moramo posegnuti za nekim iterativnim postupkom. Na sreću, funkcija gubitka \(\mathcal{L}_\mathrm{CE}\) je konveksna [2]. To znači da gradijentne metode poput gradijentnog spusta sigurno neće zapeti u nekom lokalnom optimumu (iako mogu podbaciti zbog drugih razloga).
Funkciju gubitka \(\mathcal{L}_\mathrm{CE}\) možemo optimirati raznim gradijentnim postupcima. Takvi postupci u svakoj iteraciji učenja pomiču parametre u smjeru negativnog gradijenta gubitka. Period tijekom kojeg algoritam dobije na uvid sve podatke za učenje nazivamo epohom. Ovisno o težini problema, za konvergenciju su potrebne desetine, stotine, ili tisuće epoha.
Glavni izazov kod gradijentnih pristupa optimizacije predstavlja određivanje gradijenta gubitka po svim parametrima postupka. S obzirom na to da gubitak i-tog podatka u logističkoj regresiji možemo promatrati kao kompoziciju logaritmiranog softmaksa i afine transformacije podataka, gradijente određujemo primjenom pravila ulančavanja.
Literatura:
Ovdje ćemo skicirati optimirani postupak računanja parcijalnih derivacija funkcije gubitka binarne logističke regresije. Za početak, dogovorimo notaciju. Označimo gubitak i-tog podatka s \( \mathcal{L}_i(\mathbf{w},\mathbf{b}|\mathcal{x}_i,y_i)= -\log P(Y=y_i|\mathbf{x}_i) \). Definirajmo parcijalnu derivaciju \(∂\mathcal{L}_i/∂\mathbf{w}\) i predstavimo je retčanim vektorom u kojem se nalaze gradijenti gubitka \(\mathcal{L}_i\) po elementima parametra \(\mathbf{w}\). Slično, neka parcijalna derivacija \(∂\mathcal{L}_i/∂b\) bude retčani vektor gradijenata gubitka \(\mathcal{L}_i\) po parametru \(b\).
Kako bismo omogućili kompaktniji zapis aposteriorne vjerojatnost i-tog razreda, možemo uvesti proširenu sigmoidalnu funkciju koja uzima u obzir točan razred podatka čiju klasifikacijsku mjeru transformiramo u vjerojatnost:
\( \sigma_P(y,s)= \begin{cases} \sigma(s),& y=c_1\\ 1-\sigma(s),& y=c_0 \end{cases} = \begin{cases} \frac{e^{s}}{1+e^{s}},& y=c_1\\ \frac{1}{1+e^{s}},& y=c_0 \end{cases} \)
Sada gubitak \(\mathcal{L}_i\) odgovara kompoziciji logaritmirane proširene sigmoide i afine redukcije i-tog podatka (podsjetimo se, \(s_i\) označava skalarnu klasifikacijsku mjeru podatka \(\mathbf{x}_i\)):
\( \mathcal{L}_i(\mathbf{w},\mathbf{b}| \mathbf{x}_i) = - \log \sigma_P(y_i,s_i)\\ s_i = \mathbf{w}^\top\mathbf{x}_i+ b \)
Gradijente parametara stoga možemo izraziti prema pravilu ulančavanja kao umnožak matrica parcijalnih derivacija (tzv. Jacobijevih matrica) funkcija \(\mathcal{L}_i\) i \(s_i\):
\( ∂\mathcal{L}_i/∂\mathbf{w} = ∂\mathcal{L}_i/∂s_i · ∂s_i/∂\mathbf{w} \\ ∂\mathcal{L}_i/∂b = ∂\mathcal{L}_i/∂s_i · ∂s_i/∂b \)
Parcijalna derivacija gubitka \(\mathcal{L}\) po linearnom klasifikacijskom rezultatu \(s\) u podatku \(\mathbf{x}_i\) jest skalar \(∂\mathcal{L}_i/∂s_i\) kojeg promatramo kao Jakobijan dimenzija 1x1. Parcijalne derivacije klasifikacijske mjere podatka \(\mathbf{x}_i\) po elementima parametara \(\mathbf{w}\) odnosno \(b\), su matrica \(∂s_i/∂\mathbf{w}\) dimenzija 1xD odnosno skalar \(∂s_i/∂b\) kojeg promatramo kao matricu 1x1. Izrazimo prvo derivaciju gubitka po klasifikacijskoj mjeri tako da ovisnost o točnom razredu i-tog podatka izrazimo Iversonovim uglatim zagradama. Ako se dogovorimo da vrijednost izraza \([\![q]\!]\) iznosi 1 ako je \(q\) istinit a nula inače, traženu parcijalnu derivaciju možemo predstaviti sljedećim izrazom (provjerite to za vježbu!):
\( ∂\mathcal{L}_i/∂s_i = P(c_1|\mathbf{x}_i) - [\![y_i=c_1]\!] . \)
Parcijalna derivacija klasifikacijske mjere po parametrima \(\mathbf{w}\) i \(b\) za podatak \(\mathbf{x}_i\) sada je:
\( ∂s_i/∂\mathbf{w} = \mathbf{x}_i^\top \\ ∂s_i/∂b = 1 . \)
Kad uvedemo pokratu \(\mathbf{g}_s=[∂\mathcal{L}_i/∂s_i]_{i=1}^N\) te uzmemo u obzir da ukupni gubitak zbraja doprinose po svim podatcima, dobivamo konačne izraze:
\( ∂\mathcal{L}/∂\mathbf{w} = 1/N · \sum_i ∂\mathcal{L}_i/∂\mathbf{w} = 1/N · \sum_i g_{si} · \mathbf{x}_i^\top \;,\\ ∂\mathcal{L}/∂b = 1/N · \sum_i ∂\mathcal{L}_i/∂b = 1/N · \sum_i g_{si} \;. \)
Najbolja računska performansa danas se postiže izražavanjem petlji optimiranim operacijama nad matricama i vektorima. Zbog toga je jasno da ćemo u implementaciji računanje gradijenta pomaka izraziti pozivom odgovarajuće funkcije numeričke biblioteke. Manje je međutim jasno kako izbjeći pisanje petlje za računanje gradijenata težina, pa ćemo tom važnom detalju pokloniti više pažnje.
Naime, pažljivim promatranjem možemo uočiti da računanje parcijalne derivacije \(∂\mathcal{L}/∂\mathbf{w}\) možemo vektorizirati tako da zbroj po podatcima predstavimo matričnim umnoškom. Vektore podataka ćemo organizirati u matricu \(\mathbf{X}\) dimenzija NxD. Retci matrice \(\mathbf{X}\) odgovaraju podatcima \(\mathbf{x}_i\). Parcijalne derivacije gubitaka po klasifikacijskoj mjeri smjestit ćemo u stupčani vektor \(\mathbf{g}_s\) dimenzije N. Kao što smo naveli ranije, vrijedi: \(\mathbf{g}_s = [∂\mathcal{L}_i/∂s_i]_{i=1}^N\). Lako se vidi da gradijent gubitka po k-toj težini odgovara skalarnom produktu vektora \(\mathbf{g}_s\) i k-tog stupca matrice \(\mathbf{X}\):
\( ∂\mathcal{L}/∂w_k = 1/N · \sum_i g_{si} · x_{ik} = 1/N · \mathbf{g}_s^\top \mathbf{X}_{:k} . \)
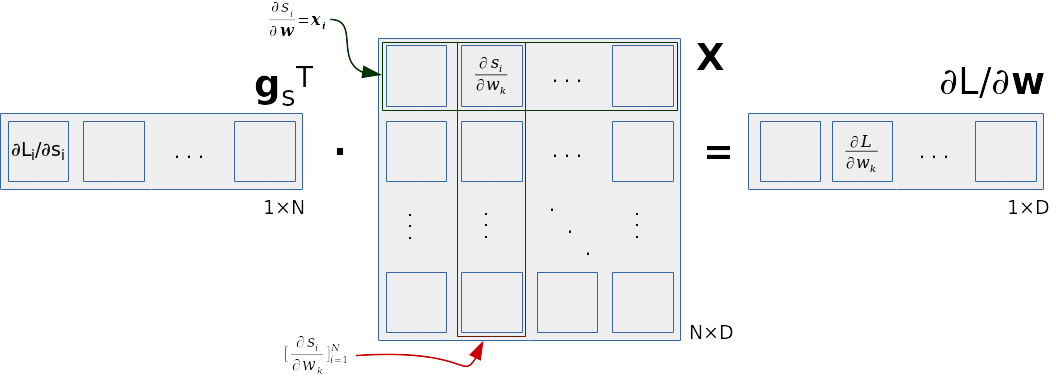
Sada je jasno da parcijalne derivacije ukupnog gubitka po svim težinama možemo dobiti produktom vektora \(\mathbf{g_s}^\top\) i podatkovne matrice \(\mathbf{X}\):
\( ∂\mathcal{L}/∂\mathbf{w} = 1/N · \mathbf{g_s}^\top \cdot \mathbf{X} \;. \)
Taj umnožak prikazan je na sljedećoj slici. Na slici se vidi da retci podatkovne matrice sadrže pojedinačne podatke te odgovaraju parcijalnoj derivaciji klasifikacijske mjere po vektoru težina za taj podatak. Stupci podatkovne matrice odgovaraju parcijalnim derivacijama po pojedinačnim komponentama vektora težina. Parcijalnu derivaciju ukupnog gubitka po k-toj težini dobivamo skalarnim produktom vektora \(\mathbf{g_s}\) i k-tog stupca matrice \(\mathbf{X}\).
Napominjemo da postoji dobar razlog
da matrica podataka ima strukturu NxD.
U tom su slučaju komponente pojedinog podatka
pohranjene na uzastopnim memorijskim lokacijama
pa miješanje podataka i operacije nad grupama (engl. batch)
uzrokuju manje promašaja priručne memorije.
U programskoj implementaciji htjet ćemo dobiti
gradijente grad_w koji po dimenzijama
odgovaraju originalnim parametrima
pa ćemo gornji izraz naprosto transponirati.
U tom slučaju, poboljšane vrijednosti parametara
dobivamo oduzimanjem gradijenata grad_w
moduliranih hiper-parametrom param_delta.
Jednadžbe gradijenata parametara višerazredne logističke regresije vrlo su slične odgovarajućim gradijentima binarne logističke regresije. To nas ne treba čuditi jer se lako uviđa da je softmax poopćenje sigmoidalne funkcije. Međutim, izražavanje tih gradijenata otežava struktura parametra \(\mathbf{W}\). Da izbjegnemo poteškoće, odvojeno ćemo promatrati gradijente svakog od C redaka matrice \(\mathbf{W}\), te usporedno s njima gradijente svakog od C elemenata vektora \(\mathbf{b}\). Označimo te retke odnosno elemente s \(\mathbf{W}_{j:}\) i \(b_j\), a njihove parcijalne derivacije s \(∂\mathcal{L}/∂\mathbf{W}_{j:}\) (matrica dimenzija 1xD) i \(∂\mathcal{L}/∂b_j\) (matrica dimenzija 1x1). Kao i ranije, gradijente je najlakše prikazati tako da ovisnost o točnom razredu i-tog podatka prikažemo Iversonovim uglatim zagradama. Prvo ćemo izraziti gradijent funkcije gubitka za i-ti podatak \(\mathcal{L}_i\) po j-toj klasifikacijskoj mjeri (izvedite ovaj izraz za vježbu!): \( ∂\mathcal{L}_i/∂s_{ij} = P(Y=c_j|\mathbf{x}_i) - [\![y_i=c_j]\!]. \)
U izvedbi je ove parcijalne derivacije najpraktičnije sakupiti u matricu \( \mathbf{G}_\mathbf{s}= [[∂\mathcal{L}_i/∂s_{ij}]_{j=1}^C]_{i=1}^N \) dimenzija \(N\times C\). Kako bismo tu matricu efikasno izračunali, uvodimo matricu aposteriornih vjerojatnosti podataka \(\mathbf{P}_{ij} = P(c_j|\mathbf{x_i})\) te matricu vektorski kodiranih oznaka \(\mathbf{Y}\):
\(\mathbf{Y}_{ij}= \begin{cases} 1,& y_i=c_j\\ 0,& y_i \neq c_j \; . \end{cases} \)
Sada matricu parcijalnih derivacija gubitka po klasifikacijskim mjerama dobivamo jednostavnim matričnim izrazom \( \mathbf{G}_\mathbf{s} = \mathbf{P} - \mathbf{Y} \; . \)
Parcijalne derivacije klasifikacijskih mjera po parametrima iste su kao i kod binarne logističke regresije:
\( ∂s_{ij}/∂\mathbf{W}_{j:} = \mathbf{x_i}^\top \\ ∂s_{ij}/∂b_j = 1 . \)
Kad ulančimo gradijente komponenata gubitka te uzmemo u obzir da ukupni gubitak zbraja doprinose po svim podatcima, dobivamo izraz kojeg možemo koristiti u optimizacijskom postupku:
\( ∂\mathcal{L}/∂\mathbf{W}_{j:} = 1/N · \sum_i ∂\mathcal{L}_i/∂\mathbf{W}_{j:} = 1/N · \sum_i ∂\mathcal{L}_i/∂s_{ij} · ∂s_{ij}/∂\mathbf{W}_{j:}\\ ∂\mathcal{L}/∂\mathbf{W}_{j:} = 1/N · \sum_i G_{sij} · \mathbf{x}_i^\top \\ ∂\mathcal{L}/∂b_j = 1/N · \sum_i ∂\mathcal{L}_i/∂b_j = 1/N · \sum_i G_{sij} . \)
Pažljivim promatranjem ovog izraza uočit ćemo ogromnu sličnost s odgovarajućim izrazom gradijenata parametara binarne logističke regresije. To nas ne treba čuditi, jer retci matrice težina \(\mathbf{W}\) u višerazrednom gubitku sudjeluju na potpuno isti način kao i težine \(\mathbf{w}\) u gubitku binarne logističke regresije. Komponente gradijenta \( ∂\mathcal{L}/∂\mathbf{W}_{j:} \) odgovaraju skalarnom produktu j-tog stupca matrice \(\mathbf{G}_s\) sa stupcima podatkovne matrice \(\mathbf{X}\). Stoga bismo, kao i kod binarne logističke regresije, sve gradijente j-tog retka matrice težina mogli izračunati umnoškom vektora \(\mathbf{G}_{\mathbf{s}:j}\) i matrice \(\mathbf{X}\):
\( ∂\mathcal{L}/∂\mathbf{W}_{j:} = 1/N \cdot \mathbf{G}^\top_{\mathbf{s}:j} \cdot \mathbf{X} \;. \)
Međutim, pokazuje se da u praksi možemo i bolje od toga. Važno svojstvo našeg problema jest da su parcijalne derivacije klasifikacijskih mjera po odgovarajućim redcima matrice težina međusobno jednake: \( ∂s_{ij}/∂\mathbf{W}_{j:} = \mathbf{x_i}^\top \forall j . \) Odatle slijedi da gradijente svih redaka matrice težina vrlo praktično možemo izračunati samo jednim matričnim umnoškom:
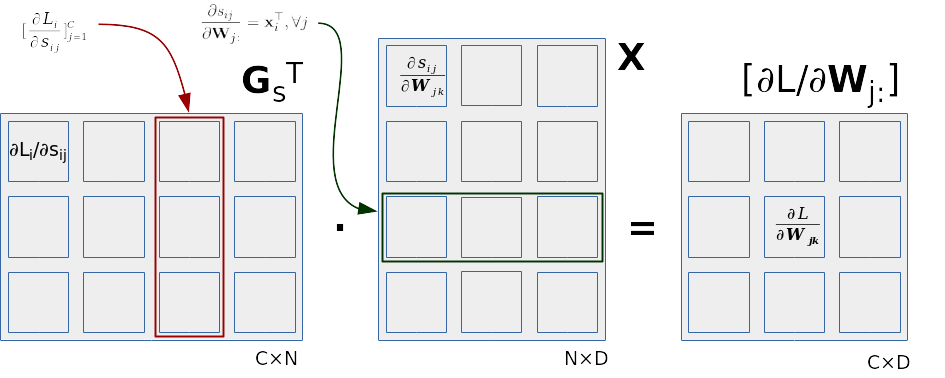
\( [∂\mathcal{L}/∂\mathbf{W}_{j:}]_{j=1}^C = 1/N \cdot \mathbf{G}^\top_\mathbf{s} \cdot \mathbf{X} \)
Prikazani izraz relativno je lako zapamtiti, ali iznimno teško objasniti reverse engineeringom. Često se može čuti objašnjenje kako do tog izraza dolazimo izravnom primjenom pravila ulančavanja. Međutim, takvo objašnjenje je netočno jer pravilom ulančavanja ne možemo računati parcijalne derivacije po matričnoj varijabli. Ako ustrajemo na takvom pristupu, morat ćemo ili izravnati matricu u vektor ili prihvatiti da Jakobijan u tom slučaju postaje tenzor trećeg reda. U oba slučaja složenost našeg algoritma bi se povećala jer ne bismo mogli iskoristiti inherentnu algebarsku strukturu problema, koju možemo jednostavno izraziti ovako: \(∂s_{ij}/∂\mathbf{W}_{k:} = 0, j\neq k\). Stoga, izraz \(\mathbf{G}^\top_\mathbf{s}\cdot\mathbf{X}\) treba promatrati kao kompliciranu optimizaciju, a ne kao početnu točku za razumijevanje načina za određivanje gradijenata matrice težina višerazredne logističke regresije. Molimo studente koji prakticiraju nelinearno učenje da ovu netrivijalnu ali vrlo važnu činjenicu prihvate i zapamte što je moguće prije.
Optimirani izraz za računanje gradijenata
višerazredne logističke regresije
prikazan je na sljedećoj slici.
Na slici vidimo da doprinos svakog podatka
gradijentima težina odgovara vanjskom umnošku
stupca matrice \(\mathbf{G}^\top_\mathbf{s}\)
(odnosno, retka matrice \(\mathbf{G_s}\))
i odgovarajućeg retka podatkovne matrice.
Kad bismo imali jedan podatak (indeks i)
i kad bismo računali gradijente
samo jednog retka matrice težina (indeks j),
matrica \(\mathbf{G_s}\) svela bi se
na element \(\mathbf{G}_{\mathbf{s}ij}\),
a matrica \(\mathbf{X}\) na redak \(\mathbf{x}_i\).
U praksi, gradijente težina
\(
[\frac{\partial\mathcal{L}}
{\partial\mathbf{W}_{j:}}]_{j=1}^C
\)
računat ćemo jednim pozivom
funkcije matrične biblioteke,
npr.
grad_W = 1/N * np.dot(GsT, X).
Na taj način jednim pozivom
rješavamo sljedeća dva zadatka:
Vrlo sličan postupak imat ćemo i za
gradijent pomaka \(\mathbf{b}\),
samo što ćemo umjesto matričnog množenja
pozivati funkciju za istovremeno zbrajanje
svih stupaca matrice, npr.
np.sum(GsT, axis=1).
Ovakve manevre vrlo rado ćemo koristiti u praksi kako programske petlje ne bi bile u programskom jeziku visoke razine nego u optimiranom bibliotečnom kodu koji može biti i do 100 puta brži od naivnog koda u C-u. Naime, ako je numpy preveden s OpenBLAS-om, izvedba matričnog množenja će koristiti optimirani kod koji jako pazi na promašaje cachea i temelji se na ručno optimiranom strojnom kodu koji je prilagođen za konkretnu mikroarhitekturu. Nadalje, ako je OpenBLAS konfiguriran da koristi OpenMP, u naš algoritam biti će upregnute sve procesorske jezgre - a to bi rezultiralo dodatnim ubrzanjem. Neke konkretne brojeve možete pogledati ovdje (u tim eksperimentima OpenMP je bio isključen).
Python je moderni dinamički jezik opće namjene koji je zbog svoje univerzalne primjenljivosti postao iznimno popularan u područjima vezanim uz umjetnu inteligenciju. Ako niste položili Skriptne jezike, predlažemo da samostalno proučite skriptu ili knjigu. Koristit ćemo Python 3. Preporučamo vam da isprobate naprednu interaktivnu ljusku ipython.
Izvorni kod u Pythonu smještamo u datoteke koje nazivamo modulima. Svaki modul u sebi treba sadržavati kratki ispitni program koji testira funkcionalnost modula i ilustrira njegovo pravilno korištenje. Ispitne programe smještamo na kraj modula u tijelu uvjetne naredbe koja testira je li modul pokrenut kao glavni program. Na taj način omogućavamo provođenje testiranja jednostavnim izvršavanjem modula.
if __name__=="__main__":
# test, test, test!
Postoji više načina za debuggiranje u Pythonu.
Jedan od najzgodnijih oslanja se na
ugrađeni Pythonov debugger pdb
kojeg možemo pozvati izravno iz koda.
Da bismo to proveli, potrebno je prvo
uključiti odgovarajući modul:
import pdb
Zatim, na mjestu gdje želimo prekinuti izvođenje (breakpoint!) navedemo poziv:
pdb.set_trace()
Nakon tog poziva Python će otvoriti interaktivnu
ljusku
u kojoj će biti dostupna sva imena programa
koja su bila vidljiva u trenutku poziva funkcije
set_trace.
Iz ljuske možemo ispisivati objekte,
pozivati proizvoljne funkcije (!)
i izvršavati proizvoljne naredbe Pythona (!).
Pored toga, na raspolaganju nam je i čitav niz
specijalnih naredbi za debuggiranje.
Popis tih naredbi dobivamo naredbom help
(neke od važnijih naredbi su up,
down i continue).
Sličan učinak možemo postići i pozivom funkcije
IPython.embed()
(međutim, tu naredbe za debuggiranje nisu dostupne).
Na kraju ćemo pokazati kako debuggirati kod koji baca neočekivane iznimke na sljedećem minimalnom primjeru:
def proba():
a=5
raise ValueError("Iznimka!")
if __name__=="__main__":
proba()
Testiranjem ovog programa vrlo lako se možemo uvjeriti
da njegovo izvršavanje završava iznimkom
ValueError.
Malo teže je međutim doći do podrobnijih informacija
o stanju programa na mjestu gdje se iznimka dogodila,
poput npr. ispisivanja vrijednosti imena a.
Problem možemo riješiti pokretanjem debuggera
pdb proba.py
te zadavanjem naredbe continue
(skraćeno "c").
Dubugger će početi izvoditi program
te kad dođe do neuhvaćene iznimke
omogućit će nam uvid u stanje programa
preko tekstovnog korisničkog sučelja.
Primjerice, naredba print a
će ispisati vrijednost imena a
neposredno prije bacanja iznimke.
Do debuggera možemo doći i
iz alternativne ljuske ipython
na način da nakon interaktivnog poziva
čije izvršavanje završava neuhvaćenom iznimkom
zadamo naredbu debug.
Ovaj tekst pretpostavlja rad u čistom Pythonu, a ne korištenje posrednika poput Jupytera i sl. Ako vam se sviđa, slobodno koristite Jupyter, ali ne garantiramo da će sve raditi kako piše u ovim uputama.
Numpy je popularna numerička biblioteka za Python.
U primjerima ćemo koristiti standardnu pokratu np
do koje dolazimo naredbom:
import numpy as np
Matplotlib
je biblioteka koja se često kombinira s numpyjem,
a služi za izradu raznih vrsta grafova u Pythonu.
U primjerima ćemo koristiti standardnu pokratu plt
do koje dolazimo naredbom:
import matplotlib.pyplot as plt
Važna prednosti numpyja jest
mogućnost svođenja iterativnih postupaka
na vektorske i matrične izraze.
Za primjer, pogledajmo kako bismo u numpyju izrazili
afinu transformaciju podataka koja predstavlja
važan korak pri učenju logističke regresije.
Neka su podatci zadani numpyjevom matricom
X dimenzija NxD
(svaki redak odgovara jednom D-dimenzijskom podatku),
neka je transponirana matrica težina \(\mathbf{W}^\top\)
zadana numpyjevom matricom W_t dimenzija DxC
te neka je transponirani vektor pomaka \(\mathbf{b}^\top\)
zadan numpyjevim vektorom b_t dimenzija 1xC.
Tada afinu transformaciju svih podataka
dobivamo jednostavnim pozivom numpyjevih funkcija
za matrično množenje i zbrajanje:
H = np.dot(X, W_t) + b_t
Obratimo međutim pozornost na jedan detalj
koji bi nakon površnog pogleda mogao i promaknuti.
Pažljivom analizom prikazane naredbe Pythona
uočavamo da dimenzije pribrojnika ne odgovaraju:
matrični umnožak np.dot(X, W_t)
ima dimenzije NxC dok vektor b_t
ima dimenziju 1xC (N != 1).
Biblioteka numpy takva nesuglasja rješava
pod pretpostavkom da vektor b_t
treba dodati *svakom* retku matričnog umnoška.
Stoga će nakon izvršavanja naredbe dodjeljivanja
ime H uistinu referencirati matricu
čiji retci odgovaraju afino transformiranim
retcima podatkovne matrice.
Kad se podsjetimo da se i-ti podatak
nalazi u i-tom retku matrice podataka
(\(\mathbf{x}_{i} = \mathbf{X}_{i:}^\top\)),
konačnu vrijednost i-tog retka matrice H
moći ćemo zapisati i sljedećim izrazom:
\(\mathbf{H}_{i:}^\top =
\mathbf{W}
\cdot
\mathbf{x}_{i}
+
\mathbf{b}
\).
Upravo smo vidjeli da numpy po potrebi automatski umnožava operand manje dimenzionalnosti (engleski termin je broadcasting) kako bi došao do valjanog izraza. Ovakvo izražavanje je ispočetka vrlo teško prihvatiti, ali nakon nekog vremena postaje jasno da prednosti (sažetost i efikasnost) uvjerljivo nadjačavaju nedostatke.
Rješenje ove vježbe slobodno preuzmite ovdje.
Ponovite Python, numpy, i matplotlib prema odjeljcima 0g i 0h.
U ovoj vježbi ćemo izvesti razred Random2DGaussian
koji će nam omogućiti uzorkovanje 2D podataka
generiranih slučajnom Gaussovom distribucijom.
Konstruktor razreda treba stvarati parametre
slučajne bivarijatne Gaussove razdiobe (vektor μ i matricu Σ).
Metoda get_sample(n) treba vratiti
n slučajno uzorkovanih
2D podataka u numpyjevom polju dimenzija Nx2.
Položaj i varijanca razdiobe trebaju biti ograničeni
fiksnim parametrima.
Pomoć:
minx=0, maxx=10,
miny=0, maxy=10);
neka to budu podatkovni članovi razreda.
np.random.random_sample).
eigvalx = (np.random.random_sample()*(maxx - minx)/5)**2
np.random.multivariate_normal.
np.random.seed(100)
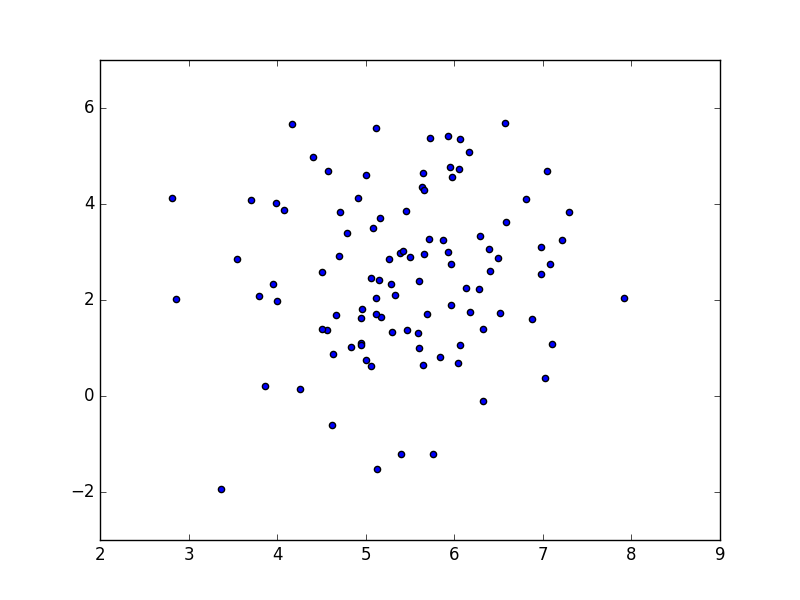
Ispravnost koda provjerite sljedećim ispitnim programom:
if __name__=="__main__":
G=Random2DGaussian()
X=G.get_sample(100)
plt.scatter(X[:,0], X[:,1])
plt.show()
Ovisno o stanju generatora slučajnih brojeva, vaš rezultat mogao bi izgledati kao na sljedećoj slici:
Ako je rezultat prihvatljiv, pohranite kod
u datoteku data.py.
Ponovite binarnu logističku regresiju prema odjeljcima 0d i 0e.
Napišite funkciju binlogreg_train
koja optimizira parametre logističke regresije
\(\mathbf{w}\) i \(b\) na zadanom skupu podataka za učenje.
U vašem izvornom kodu koristite sljedeća imena:
X: matrica podataka dimenzija NxD;
Y_: vektor točnih razreda podataka
dimenzija Nx1
(koristimo ga tijekom učenja);
Y: vektor predviđenih razreda podataka
dimenzija Nx1
(koristimo ga tijekom ispitivanja performanse).
Neka funkcija ima sljedeće sučelje:
def binlogreg_train(X,Y_):
'''
Argumenti
X: podatci, np.array NxD
Y_: indeksi razreda, np.array Nx1
Povratne vrijednosti
w, b: parametri logističke regresije
'''
Upute:
param_niter.
scores = np.dot(X, w) + b).
grad_w i
grad_b
na način da petlje prepustite numpyju.
param_delta
bude hiper-parametar postupka).
Struktura vaše izvedbe gradijentnog spusta trebala bi izgledati ovako:
# gradijentni spust (param_niter iteracija)
for i in range(param_niter):
# klasifikacijske mjere
scores = ... # N x 1
# vjerojatnosti razreda c_1
probs = ... # N x 1
# gubitak
loss = ... # scalar
# dijagnostički ispis
if i % 10 == 0:
print("iteration {}: loss {}".format(i, loss))
# derivacije gubitka po klasifikacijskim mjerama
dL_dscores = ... # N x 1
# gradijenti parametara
grad_w = ... # D x 1
grad_b = ... # 1 x 1
# poboljšani parametri
w += -param_delta * grad_w
b += -param_delta * grad_b
Napišite funkciju binlogreg_classify
koja klasificira zadani skup podataka
u skladu sa zadanim parametrima logističke regresije.
Neka funkcija ima sljedeće sučelje:
'''
Argumenti
X: podatci, np.array NxD
w, b: parametri logističke regresije
Povratne vrijednosti
probs: vjerojatnosti razreda c1
'''
Napišite funkciju sample_gauss_2d(C, N)
koja stvara C slučajnih
bivarijatnih Gaussovih razdioba
(prisjetimo se, njih smo u zadatku 1
implementirali razredom Random2DGaussian),
te iz svake od njih uzorkuje N podataka.
Funkcija treba vratiti matricu X
dimenzija (N·C)x2
čiji retci odgovaraju uzorkovanim podatcima
te matricu točnih razreda Y
dimenzija (N·C)x1
čiji jedini stupac sadrži indeks razdiobe
iz koje je uzorkovan odgovarajući podatak.
Ako je X
uzorkovan iz razdiobe Y[i,0]==j.
Napišite funkciju eval_perf_binary(Y,Y_)
koja na temelju predviđenih i točnih indeksa razreda
određuje pokazatelje performanse binarne klasifikacije:
točnost (engl. accuracy),
preciznost (engl. precision)
te odziv (engl. recall).
Implementaciju te funkcije temeljite na brojnostima
istinitih pozitiva (TP),
lažnih pozitiva (FP),
istinith negativa (TN)
i lažnih negativa (FN).
Napišite funkciju eval_AP koja računa
prosječnu preciznost
binarne klasifikacije.
Neka funkcija na ulazu prima
rangiranu listu točnih razreda \(\mathbf{Y_r}\)
koju dobivamo kad matricu točnih razreda \(\mathbf{Y}\)
sortiramo prema aposteriornim vjerojatnostima
odgovarajućih podataka \(P(c_1|\mathbf{x})\).
Rangiranu listu točnih razreda možete dobiti
pozivom metode argsort numpyjevog polja.
Prosječnu preciznost možete izračunati
primjenom sljedećeg izraza:
\(
\operatorname{AP} =
\frac{\sum_{i=0}^{N-1}
\mathrm{Preciznost}(i) \cdot \mathbf{Y_r}_i}
{\sum_{i=0}^{N-1} \mathbf{Y_r}_i} \; .
\)
Pri tome \(\mathrm{Preciznost}(i)\) odgovara preciznosti
u slučaju kad podatke s indeksom većim ili jednakim \(i\)
pridružimo razredu \(c_1\),
a podatke s indeksom manjim od \(i\) - razredu \(c_0\).
Evo kako bi se trebala ponašati vaša funkcija:
>>> import data
>>> data.eval_AP([0,0,0,1,1,1])
1.0
>>> data.eval_AP([0,0,1,0,1,1])
0.9166666666666666
>>> data.eval_AP([0,1,0,1,0,1])
0.7555555555555555
>>> data.eval_AP([1,0,1,0,1,0])
0.5
Napišite ispitni kod za modul binlogreg.py.
Formirajte skup za učenje pozivom
funkcije sample_gauss_2d.
Pozovite funkciju za učenje
te nakon toga provedite klasifikaciju
primjera za učenje.
Predviđene vjerojatnosti podataka
pretvorite u indekse razreda Y
pod pretpostavkom odabira razreda
s najvećom vjerojatnošću
(izbjegnite petlju u Pythonu!).
Ispišite pokazatelje performanse
dobivene pozivima funkcija
eval_perf_binary te
eval_AP.
Neka vaš ispitni kod izgleda kako slijedi.
if __name__=="__main__":
np.random.seed(100)
# get the training dataset
X,Y_ = data.sample_gauss_2d(2, 100)
# train the model
w,b = binlogreg_train(X, Y_)
# evaluate the model on the training dataset
probs = binlogreg_classify(X, w,b)
Y = # TODO
# report performance
accuracy, recall, precision = data.eval_perf_binary(Y, Y_)
AP = data.eval_AP(Y_[probs.argsort()])
print (accuracy, recall, precision, AP)
Ako vaš postupak ne postiže točnost od 100%, pokušajte naći objašnjenje.
Ako je rezultat prihvatljiv, pohranite kod
u datoteku binlogreg.py.
Funkcije sample_gauss_2d,
eval_AP i eval_perf_binary
pohranite u datoteku data.py.
Dodatni zadatci za radoznale.
param_niter,
param_delta
i param_lambda.
Pronađite kombinacije hiper-parametara
za koje vaš program ne uspijeva pronaći zadovoljavajuće rješenje
i objasnite što se događa.
Rješenje ovog zadatka slobodno preuzmite ovdje.
Napišite funkciju graph_data
za vizualiziranje rezultata
binarne klasifikacije 2D podataka.
Neka funkcija ima sljedeće parametre.
'''
X ... podatci (np.array dimenzija Nx2)
Y_ ... točni indeksi razreda podataka (Nx1)
Y ... predviđeni indeksi razreda podataka (Nx1)
'''
Upute:
plt.scatter;
koristite imenovane argumente c i
marker za zadavanje
boje, veličine i oblika simbola koji predstavljaju podatke.
Y_==Y) prikažite kružićima,
a netočno klasificirane podatke kvadratima.
Kako biste izbjegli petlju u Pythonu,
funkciju plt.scatter
možete pozvati dva puta: jednom za točno klasificirane,
a jednom za netočno klasificirane podatke.
Ispitajte vaš dosadašnji kod na podatcima
generiranim dvjema slučajnim razdiobama.
Za potrebe prvog testiranja,
predviđene indekse razrede podataka (Y)
odredite proizvoljnom funkcijom odluke, npr:
def myDummyDecision(X):
scores = X[:,0] + X[:,1] - 5
return scores
Vaš novi ispitni program za modul data
mogao bi izgledati ovako:
if __name__=="__main__":
np.random.seed(100)
# get the training dataset
X,Y_ = data.sample_gauss_2d(2, 100)
# get the class predictions
Y = myDummyDecision(X)>0.5
# graph the data points
graph_data(X, Y_, Y)
# show the results
plt.show()
Ako koristimo istu verziju generatora slučajnih brojeva, vaš rezultat sada bi trebao izgledati kao na sljedećoj slici:
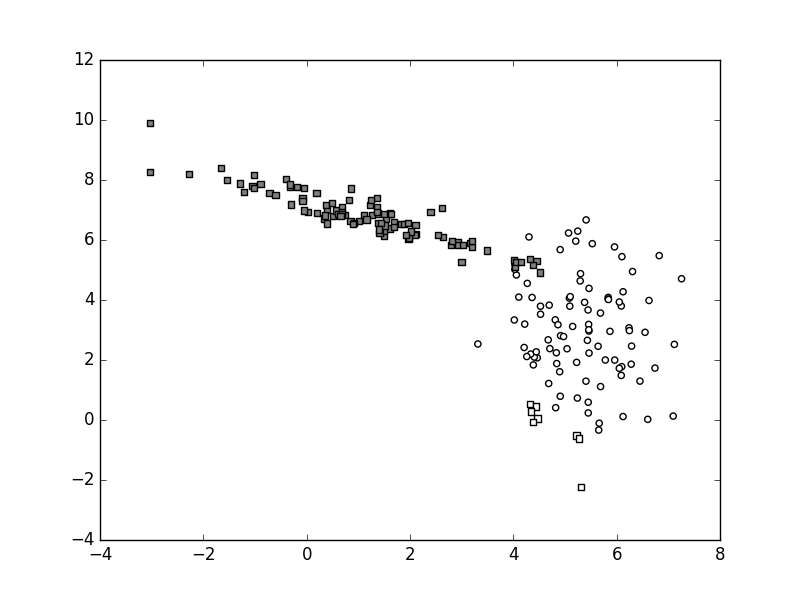
Funkcija odluke myDummyDecision
mijenja vrijednost po dijagonali sjeverozapad-jugoistok,
a njena granica prolazi blizu dna nakupine "bijelih".
Stoga su "bijeli" podatci uglavnom
ispravno klasificirani (kružići),
dok su svi "sivi" podatci neispravno klasificirani (kvadrati).
Ako je rezultat ispitivanja prihvatljiv,
pohranite kod u datoteku data.py.
Rješenje ovog zadatka slobodno preuzmite ovdje.
U praksi, funkcije odluke klasifikatora
najčešće ne vraćaju predviđeni razred podatka
kao što je to bio slučaj kod
naše funkcije myDummyDecision.
Primjerice, funkcija odluke
stroja s potpornim vektorima
vraća klasifikacijske mjere.
Predznak rezultata određuje predviđeni razred,
a granicu između dvaju razreda čine podatci
u kojima je klasifikacijska mjera jednaka nuli.
Binarna logistička regresija vraća
aposteriornu vjerojatnost \(P(Y=c_1|\mathbf{x})\).
Ako je ta vjerojatnost veća od 0.5,
klasifikator predviđa razred \(c_1\),
a granicu čine podatci u kojima je
ta vjerojatnost jednaka 0.5.
Jednaku interpretaciju najčešće imaju i
funkcije odluke dubokih klasifikatora koji,
za razliku od logističke regresije,
mogu modelirati i vrlo nelinearne granice među razredima.
Kod svih navedenih klasifikatora
oblik funkcije odluke pruža kvalitativan uvid
u ono što je klasifikator naučio.
Stoga ćemo se u ovom zadatku posvetiti
vizualizaciji funkcije odluke.
Naš cilj je razviti potprogram graph_surface
koji iscrtava plohu zadane skalarne funkcije 2D varijable
kako bismo njime mogli iscrtavati plohe funkcije odluke
klasifikatora dvodimenzionalnih podataka.
Potprogram graph_surface
treba imati sljedeće argumente:
'''
fun ... decizijska funkcija (Nx2)->(Nx1)
rect ... željena domena prikaza zadana kao:
([x_min,y_min], [x_max,y_max])
offset ... "nulta" vrijednost decizijske funkcije na koju
je potrebno poravnati središte palete boja;
tipično imamo:
offset = 0.5 za probabilističke modele
(npr. logistička regresija)
offset = 0 za modele koji ne spljošćuju
klasifikacijske mjere (npr. SVM)
width,height ... rezolucija koordinatne mreže
'''
Kao i kod potprograma graph_data
naš kod će biti tanak omotač oko biblioteke
matplotlib.
Kako bismo pozivatelja zaštitili
od izvedbenih detalja iscrtavanja,
argument fun
potprograma graph_surface
predstavlja funkciju odluke
(radi se o oblikovnom obrascu Strategija).
Funkcija odluke fun
preslikava podatke u numeričke vrijednosti
koje određuju predviđeni razred odgovarajućeg podatka
pa će to u praksi biti tanak omotač
oko klasifikatora koejg želimo vizualizairati.
Kako bismo izbjegli potrebu
za višestrukim pozivanjem iz pythonskih petlji,
funkcija odluke treba primiti podatkovnu matricu NxD,
te vratiti vektor klasifikacijskih mjera dimenzija Nx1.
Argument rect
potprograma graph_surface
zadaje dio podatkovnog vektorskog prostora
u kojem treba vizualizirati funkciju odluke.
U praksi, taj argument će ovisiti o rasponu podataka:
nema smisla prikazivati funkciju odluke
u dijelovima prostora gdje nema podataka za učenje.
Potprogram graph_surface
treba primiti i argument offset
koji zadaje vrijednost funkcije odluke
koja predstavlja granicu između razreda.
Za probabilističke modele ta granica će biti 0.5,
dok ćemo kod modela koji maksimiziraju marginu
tu granicu postaviti na 0.
Konačno, potprogram graph_surface
treba primiti i dimenzije koordinatne mreže
koje će definirati zrnatost vizualizacije.
Plohe u matplotlibu iscrtavamo primjenom funkcija
np.meshgrid i plt.pcolormesh,
kao što je to pokazano u ovom
primjeru
i službenoj
dokumentaciji
biblioteke Matplotlib.
Kako ta procedura nije baš najintuitivnija,
za ovaj zadatak ćemo dati nešto detaljnije instrukcije.
width×height
u okvirima zadanog pravokutnika rect
korištenjem funkcije np.linspace
(ili np.arange).
np.meshgrid.
flatten i
funkciju np.stack
plt.pcolormesh
metodom reshape.
plt.pcolormesh.
Koristite argumente vmin i vmax
tako da paletu centrirate u vrijednosti offset
te tako da sve vrijednosti funkcije budu u dometu palete.
offset.
Koristite crnu boju.
Evo kako bismo predloženim potprogramom
iscrtali plohu decizijske funkcije myDummyDecision
u pravokutniku određenom koordinatama skupa točaka X.
bbox=(np.min(X, axis=0), np.max(X, axis=0))
graph_surface(myDummyDecision, bbox, offset=0)
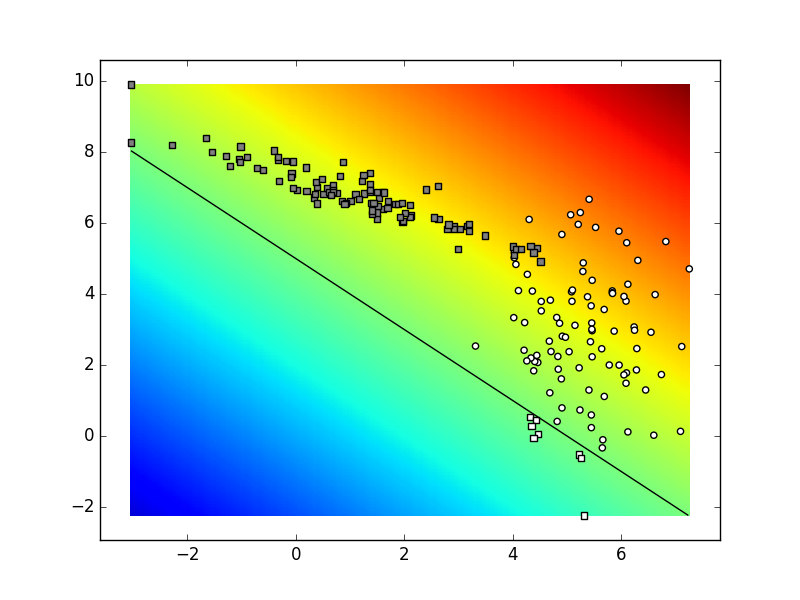
Ako ovaj odsječak uvrstimo u ispitni program
modula data.py neposredno prije poziva
funkcije graph_data,
ispod naših podataka osvanut će
decizijska ploha u duginim bojama.
Točke u kojima decizijska funkcija poprima vrijednost praga
označene su crnom linijom.
Bijeli podatci iznad crne linije označeni su kružićima
(myDummyClassifier ih je dobro klasificirao).
Bijeli podatci ispod linije i crni podatci iznad linije
označeni su kvadratićima
(myDummyClassifier ih je loše klasificirao).
Ako je rezultat ispitivanja prihvatljiv,
pohranite kod u datoteku data.py.
Sada imamo gotovo sve sastojke za konačnu provjeru
naše implementacije binarne logističke regresije.
Nedostaje nam samo funkcija koja bi bila prikladna
za slanje potprogramu graph_surface.
U slučaju binarne logističke regresije,
željena funkcija trebala bi primiti podatke X,
a vratiti vektor aposteriorne vjerojatnosti razreda.
Funkcija binlogreg_classify
izgleda kao obećavajući kandidat,
ali ne može se izravno primijeniti
jer prima dva argumenta viška
(w i b).
U programskim jezicima sa statičkim funkcijama
ovaj izazov bismo teško riješili bez globalnih varijabli.
Međutim, u Pythonu ovo možemo lakoćom izvesti
primjenom kontekstne funkcije (engl. closure)
koju možemo konstruirati pozivom sljedeće funkcije:
def binlogreg_decfun(w,b):
def classify(X):
return binlogreg_classify(X, w,b)
return classify
Funkcija binlogreg_decfun
vraća lokalnu funkciju koja pamti kontekst (w,b).
Stoga tu lokalnu funkciju možemo koristiti
kao argument funkcije graph_surface
(radi se o oblikovnom obrascu Dekorator).
Prikazana fukcionalnost može se sažetije ostvariti
lambda izrazom (napravite to za vježbu!).
Početnicima savjetujemo da napreduju malim koracima
te da lambda izraze koji pamte kontekst
počnu koristiti tek nakon što
u potpunosti usvoje kontekstne funkcije.
Sada konačno možemo iscrtati rezultate naše izvedbe binarne logističke regresije sljedećim kodom:
# instantiate the dataset
# ...
# train the logistic regression model
# ...
# evaluate the model on the train set
# ...
# recover the predicted classes Y
# ...
# evaluate and print performance measures
# ...
# graph the decision surface
decfun = binlogreg_decfun(w,b)
bbox=(np.min(X, axis=0), np.max(X, axis=0))
data.graph_surface(decfun, bbox, offset=0.5)
# graph the data points
data.graph_data(X, Y_, Y, special=[])
# show the plot
plt.show()
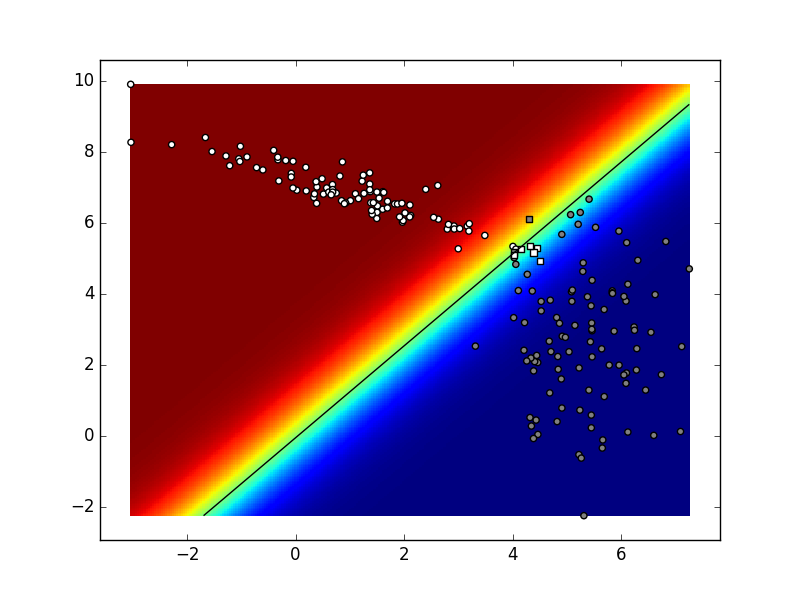
Ovisno o stanju generatora slučajnih brojeva te vrijednostima hiper-parametara vaš rezultat mogao bi izgledati kao na sljedećoj slici:
Ako sliku izradimo u svakoj iteraciji postupka, dobivamo sljedeću animaciju. Pokušajte objasniti razlike između konačnog stanja ove animacije i funkcije odluke koja je prikazana na prethodnoj slici.
Ponovite višerazrednu logističku regresiju prema odjeljcima 0d i 0f.
Naš konačni zadatak je napisati kod za učenje i primjenu
logističke regresije nad podatcima proizvoljnog broja razreda.
Potrebno je napisati funkciju logreg_train
koja kao argumente prima podatkovnu matricu X
i matricu indeksa točnih razreda Y_.
Na izlazu je potrebno vratiti parametre
logističke regresije W i b.
Dimenzije tih parametara trebaju ovisiti
o broju razreda C
kojeg možete odrediti izrazom max(Y_) + 1.
Struktura tijela petlje gradijentnog spusta trebala bi izgledati ovako:
# eksponencirane klasifikacijske mjere
# pri računanju softmaksa obratite pažnju
# na odjeljak 4.1 udžbenika
# (Deep Learning, Goodfellow et al)!
scores = ... # N x C
expscores = ... # N x C
# nazivnik sofmaksa
sumexp = ... # N x 1
# logaritmirane vjerojatnosti razreda
probs = ... # N x C
logprobs = ... # N x C
# gubitak
loss = ... # scalar
# dijagnostički ispis
if i % 10 == 0:
print("iteration {}: loss {}".format(i, loss))
# derivacije komponenata gubitka po mjerama
dL_ds = ... # N x C
# gradijenti parametara
grad_W = ... # C x D (ili D x C)
grad_b = ... # C x 1 (ili 1 x C)
# poboljšani parametri
W += -param_delta * grad_W
b += -param_delta * grad_b
Napišite funkciju logreg_classify
koja kao rezultat vraća matricu dimenzija NxC
gdje svaki redak i sadrži vjerojatnosti
klasificiranja podatka \(\mathbf{x_i}\)
u razrede \(c_j\), \(j \in \{0, 1, ..., C-1\}\).
Napišite funkciju eval_perf_multi(Y,Y_)
koja na temelju predviđenih i točnih indeksa razreda
određuje pokazatelje klasifikacijske performanse:
i) ukupnu točnost klasifikacije,
ii) matricu
zabune
(engl. confusion matrix) u kojoj
retci odgovaraju točnim razredima a stupci predikcijama
te iii) vektore preciznosti i odziva
pojedinih razreda.
U implementaciji prvo izračunajte matricu zabune,
a onda sve ostale pokazatelje na temelju nje.
Konstruirajte dekorator oko logreg_classify
koji omogućava evaluiranje modela
iz funkcije graph_surface.
Decizijsku plohu možete prikazati na više načina:
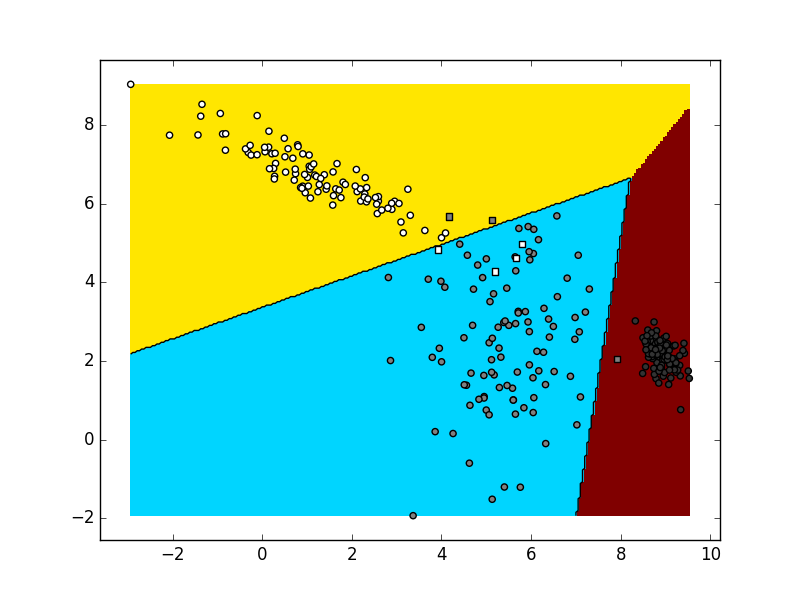
Isprobajte vaš kod najprije za slučaj C=2. Trebali biste dobiti vrlo slične rezultate kao i u binarnom slučaju. Nakon toga, provjerite što se zbiva kad vašem kodu pošaljete podatke uzorkovane iz tri slučajne Gaussove distribucije. Obratite pažnju da, kao i ranije, podatke iz svake pojedine distribucije valja označiti zasebnim razredom. Ovisno o stanju generatora slučajnih brojeva te vrijednostima hiper-parametara vaš rezultat mogao bi izgledati kao na sljedećoj slici:
Ako je rezultat ispitivanja prihvatljiv,
pohranite kod u datoteku logreg.py.
|
Ove stranice sastavljaju Petra Bevandić,
Marin Oršić, Ivan Grubišić, Josip Šarić
i Siniša Šegvić.
Prva verzija ovih stranica bila je rezultat istraživačkog projekta MULTICLOD (I-2433-2014) Hrvatske zaklade za znanost. Stranice su izrađene vi-jem i geditom. Posljednja promjena: Monday, 21-Apr-2025 15:45:42 CEST | |
Svi komentari su dobrodošli:

| Povratak |