An individual trajectory is a temporal sequence of measurements reported by a certain observer, for which it is believed that they correspond to the same object. Each measurement contains the object position converted to world coordinates, as well as the acquisition time of the image in which the object was detected. The matching procedure establishes correspondence between recent segments of trajectories containing measurements obtained within the last two seconds. Each of the obtained correspondence sets defines a 3D position of the top level blackboard object which should correspond to a real object in the scene. The correspondence procedure is different from clustering because, during the procedure, some trajectories become mutually incompatible and can not be grouped together. This occurs whenever the trajectories belong to the two correspondence sets both of which contain trajectories reported by the same observer.
The main difficulty in matching a pair of recent trajectory segments
reported by different observers is caused by the assumption
that the observers are not synchronized, i.e.
that single measurements in corresponding trajectories
have different acquisition times.
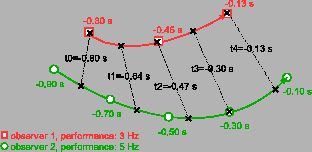
The problem has been solved by (i) finding the time interval for
which both segments are defined, (ii) taking ![]() equidistant time
instants within that interval, and (iii) interpolating
representative points in both trajectories within that instants.
The procedure is illustrated for N=5 in fig.6,
where the synchronized representative points
are designated with crosses.
equidistant time
instants within that interval, and (iii) interpolating
representative points in both trajectories within that instants.
The procedure is illustrated for N=5 in fig.6,
where the synchronized representative points
are designated with crosses.
As described in section 4, measurements of the same object recorded by different observers may systematically differ due to multiple sources of error. Experiments have shown that the dominant effect of these errors to short trajectory segments can be modeled as a simple translation. The matching is therefore based on a distance function computed as a weighted sum of mean value and standard deviation of the displacements between the corresponding representative points. The correspondence procedure follows a greedy iterative approach, such that in each iteration the least distant pair of matchable trajectories is associated together until the distance is greater than a predetermined threshold.