Eksperimentalni sustav višeagentskog aktivnog vida
Sadržaj
Laboratorijsko okruženje
Okruženje za razvoj i ispitivanje sustava se
nalazi u Laboratoriju za inteligentne sustave Zavoda
(prostorija D336).
Eksperimentalni sustav se sastoji od tri promatrača,
a zadatak mu je praćenje kretanja jednostavnih robota
AmigoBot .
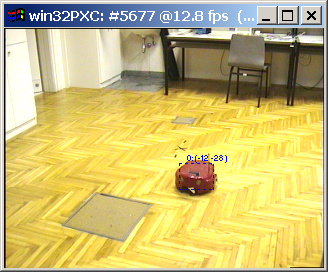
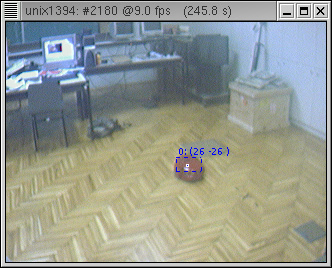
Za ilustraciju, prikazane su slike koje odgovaraju
pogledima dvaju promatrača koji prate isti objekt (sl.1-2).
U slikama je ucrtano slikovno okno detektiranog objekta te
njegov kutni položaj (zakret, nagib) u stupnjevima,
u odnosu na referentni smjer gledanja odgovarajućeg promatrača.
|
|
|
slika 1.
|
slika 2.
|
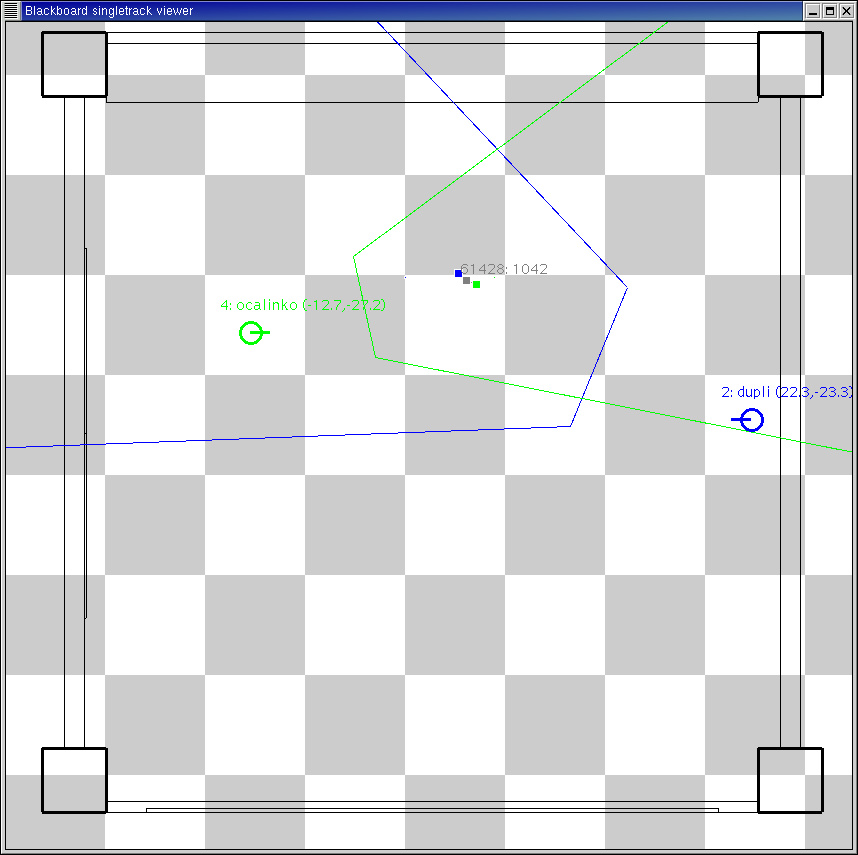
Percipirano stanje u sceni se u stvarnom vremenu dobiva
udruživanjem mjerenja pojedinih promatrača,
kao što je prikazano na sl.3.
U pozadini slike su ucrtani tlocrt laboratorija i referentna
kvadratna mreža dimenzija 1×1 metar.
Preko toga, za svakog promatrača je različitom bojom ucrtan položaj,
referentni zakret (referentni nagib iznosi 0 stupnjeva),
vidno polje, te položaj detektiranog objekta.
Slike 2. i 3. odgovaraju pogledima promatrača koji su označeni
zelenom ('ocalinko') odnosno plavom bojom ('dupli').
Dva mjerenja su na temelju načela prostorne i vremenske bliskosti
udružena u jedinstveni objekt, čiji položaj je ucrtan sivom bojom.
|
|
slika 3.
|
Arhitektura sustava
Kao što se da naslutiti iz prethodne ilustracije,
glavna svojstva koja bi opisani sustav trebao
posjedovati su:
-
Detekcija i praćenje objekata aktivnom kamerom
jednim promatračem,
uz jednostavnu prilagodbu postupka različitim platformama;
-
udruživanje podataka dobivenih od pojedinih promatrača
u zajednički prikaz scene, pod sljedećim pretpostavkama:
-
slike koje promatrači pribavljaju međusobno nisu sinkronizirane,
-
učestalosti kojima promatrači analiziraju stanje u sceni
ovise o njihovim procesnim performansama i općenito su različite,
-
promatrači imaju nezavisne satove koje je potrebno uskladiti;
-
koordinirati kretanja senzora u cilju ``optimalnog''
praćenja stanja scene, što u svakom trenutku obuhvaća
barem sljedeća dva međusobno proturječna cilja:
-
precizno određivanje položaja praćenih objekata,
-
pokrivanje što većeg prostora scene;
-
robustnost u odnosu na kvarove postojećih i
dodavanje novih promatrača;
-
rad u stvarnom vremenu, pri čemu se teži čim većim
prosječnim učestalostima obrade (soft real time).
Prvo svojstvo spada u domenu aktivnog računarskog vida,
drugo u raspoznavanje uzoraka, dok treće i četvrto
naglašavaju interakciju među inače autonomnim promatračima,
čime se bavi distribuirana umjetna inteligencija,
odnosno preciznije, teorija višeagentskih sustava.
Predložena arhitektura je uvelike određena
zahtjevom za kombinacijom računarskog vida i stvarnog vremena.
Zbog zahtjevnosti računarskog vida, ima smisla svakom
agentu-promatraču osigurati većinu procesorskog vremena na
dodijeljenom procesoru, a udruživanje i koordinaciju
prepustiti zasebnom agentu-koordinatoru.
Promatrači u takvoj organizaciji svoja mjerenja šalju
koordinatoru, koji ih onda udružuje i po potrebi
koordinira smjerove gledanja promatrača.
Komunikacijski protokol između promatrača i koordinatora
treba izbjegavati potvrde primitaka poruka
zbog nepredvidivih kašnjenja prijenosa, dohvata i obrade poruka
kako unutar promatrača tako i u koordinatoru.
Shematski prikaz toka podataka i upravljačkog toka u
opisanoj organizaciji je prikazan na sl.4.
|
|
slika 4.
|
Izvedbeni detalji
Komponente izvedbe sustava se na najvišoj razini
mogu grupirati u sljedeće skupine:
Eksperimentalni rezultati
Sustav je testiran na sljedeće dvije razine:
-
ispitivanje izoliranih
promatrača;
-
ispitivanje
koordinatora
u konfiguraciji sa višestrukim promatračima.