Radionica za učenike osnovnih škola
Računalni vid, obrada slike i primjene
Predstavljanje slika u računalu
-
Računalo "vidi" slike u obliku niza piknji (piksela).
-
Ako se radi o slici u boji, svaku piknju opisujemo s tri broja.
-
Ako brojeve uzete iz jedne slike umetnemo u drugu sliku,
možemo dobiti zabavne efekte.
-
Još zabavnije je pokušati analizom brojeva skužiti
što slika prikazuje.
Time se bavi računalni vid.
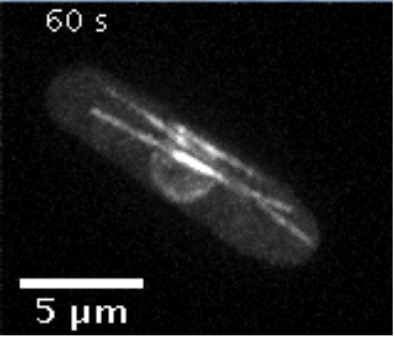
Jednostavni zadatak: izmjeriti stanicu u mikroskopskoj snimci
-
U slijedu mikroskopskih slika potrebno je pronaći
veličinu i položaj citoplazme odnosno jezgre bakterije
(ta mjerenja korisna su biolozima koji prate razvoj bakterija):
-
Položaj citoplazme možemo odrediti binarizacijom slike:
svaki piksel se postavlja na nulu odnosno jedinicu
ako je veći ili manji od zadanog praga.

-
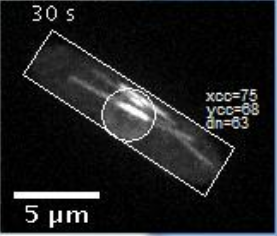
Sada statističkim metodama određujemo orijentaciju bakterije
te nakon toga opisani pravokutnik citoplazme i položaj jezgre:
-
Izvor: završni rad Dražena Dostala
(pdf)
Jednostavno raspoznavanje
-
Tipičan primjer jednostavnog raspoznavanja
jest očitavanja rukom pisanih znamenki iz skupa MNIST.
Skup sadrži 50000 znamenki koje se mogu koristiti za učenje
i 10000 znamenki na kojima se provodi testiranje postupka.

-
U tom skupu znamenke se mogu odvojiti binarizacijom
pa je jedini problem naučiti varijaciju rukopisa različitih ljudi.
Taj problem danas se tipično rješava konvolucijskim neuronskim mrežama:
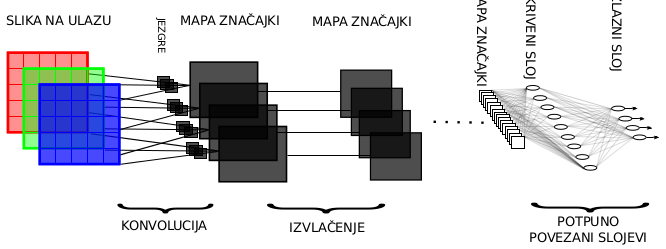
-
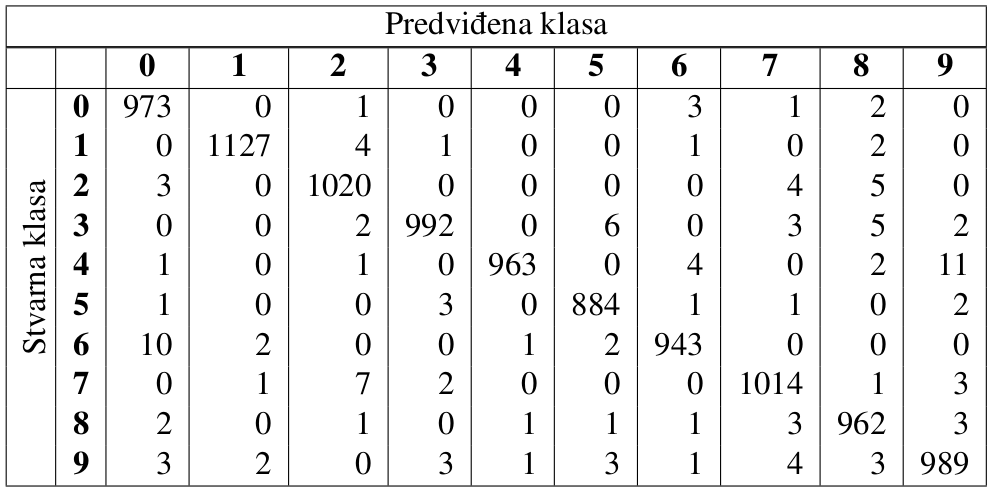
Točnost raspoznavanja možemo prikazati matricom zabune
koja jasno pokazuje koje su greške najčešće:
- Broj 4 klasificiran kao broj 9 (11 krivih klasifikacija).
- Broj 6 klasificiran kao broj 0 (10 krivih klasifikacija).
- Broj 7 klasificiran kao broj 2 (7 krivih klasifikacija).
-
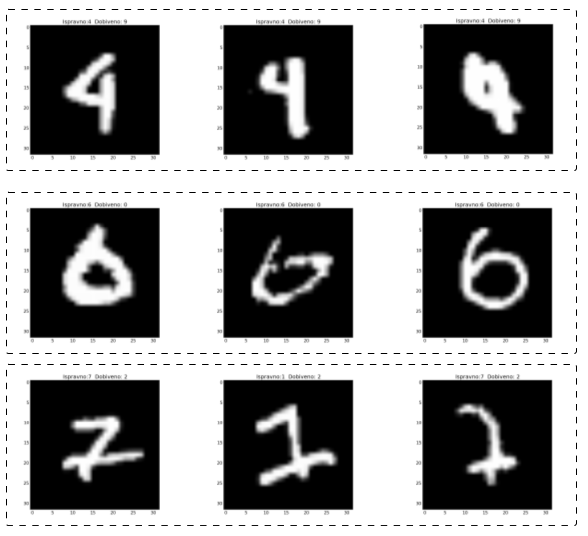
Primjeri tri najučestalije greške: a) Broj 4 klasificiran kao 9,
b) Broj 6 klasificiran kao 0, c) broj 7 klasificiran kao 2.
-
Izvor: diplomski rad Vedrana Vukotića
(pdf)
Spajanje slika i stabilizacija videa
-
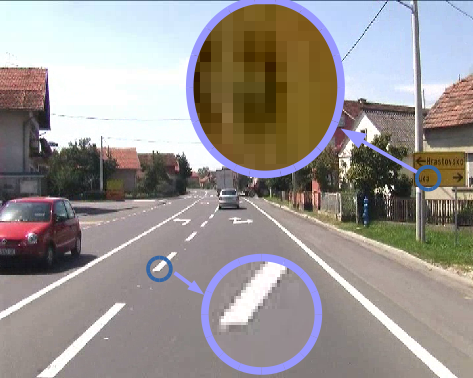
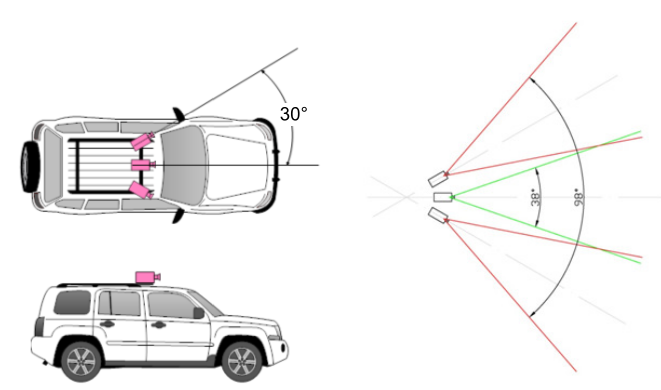
Protokol organizacije EuroRAP zahtijeva
snimanje prometnice trima kamerama:
-
Dobivene slike nije jednostavno pratiti pa ih je
korisno spojiti u jedinstveni prikaz scene:

-
Određivanjem korespondentnih točaka
(tj. točaka koje odgovaraju istom dijelu scene)
možemo izračunati transformaciju kojom lijevu i desnu sliku
transformiramo u koordinate srednje slike:

-
Video:
spajanje,
stabilizacija1,
stabilizacija2.
-
Izvori: znanstveni radovi
(pdf,
pdf).
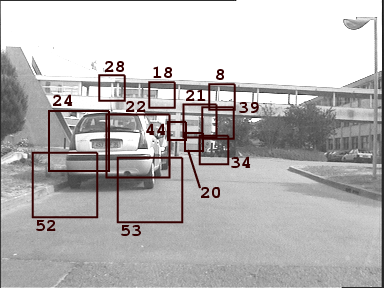
Praćenje objekata
-
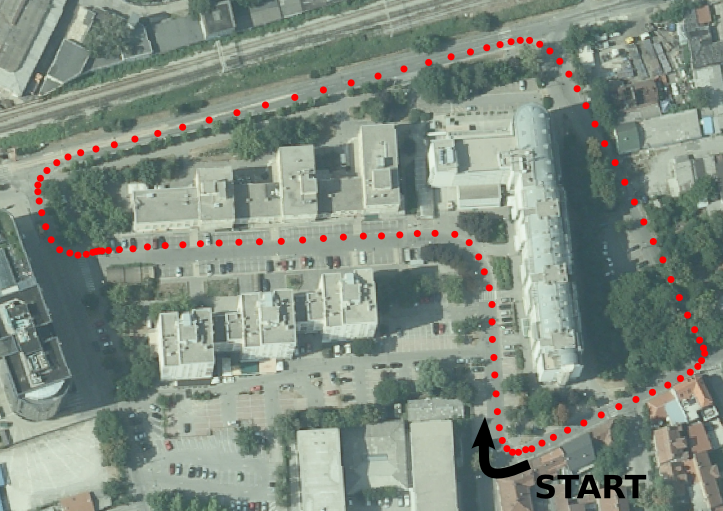
Osnovni postupak u analizi videa je praćenje značajki:
-
Ako računalo zna kakvom kamerom su slike pribavljene,
dobiveni tragovi značajki mogu poslužiti
za rekonstrukciju scene i gibanja kamere.
-
Video:
praćenje,
navigacija,
parkiranje.
-
Izvori: znanstveni radovi
(pdf,
pdf).
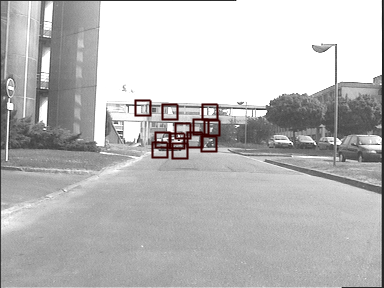
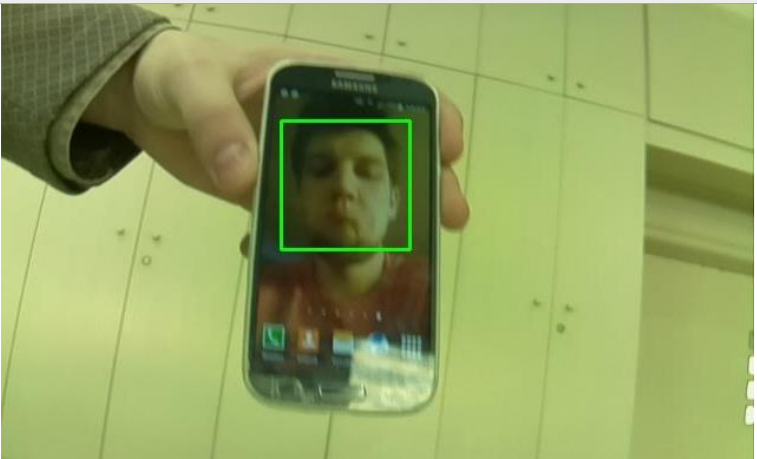
Pronalaženje objekata
-
Pronalaženje objekata u slikama je jedan
od osnovnih zadataka računalnog vida.

-
Ako je kamera nepokretna,
piksele objekta možemo pronaći
usporedbom s modelom pozadine:
-
Inače, objekt moramo potražiti na svim mogućim lokacijama slike
na način da tamo primijenimo binarni klasifikator:

-
Video:
model pozadine,
krugovi,
trokuti,
središna linija.
-
Izvori:
Klasificiranje slika
-
Ovaj zadatak sličan je pronalaženju objekata,
ali ovdje nas ne interesira lokacija objekta,
nego samo njegova prisutnost.
-
Odluka se može temeljiti i na "kontekstu":
ako u slici ima puno trave, prije će biti da se radi o kravi
nego o automobilu.
-
Ovakve metode temelje se na reprezentaciji slike
vrećom vizualnih riječi:
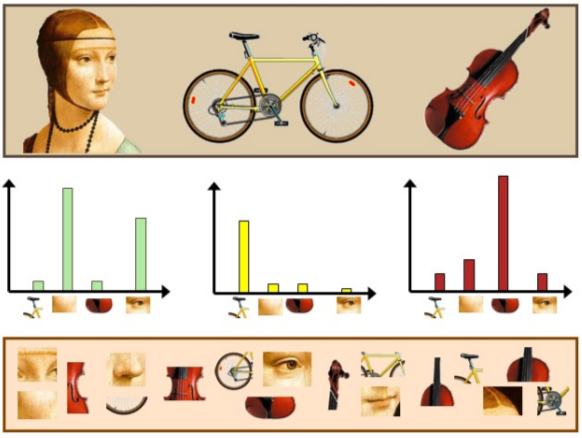
-
Izvori:
-
ilustracija klasifikacije slika vrećom vizualnih riječi:
(html)
-
znanstveni radovi
(pdf,
pdf).
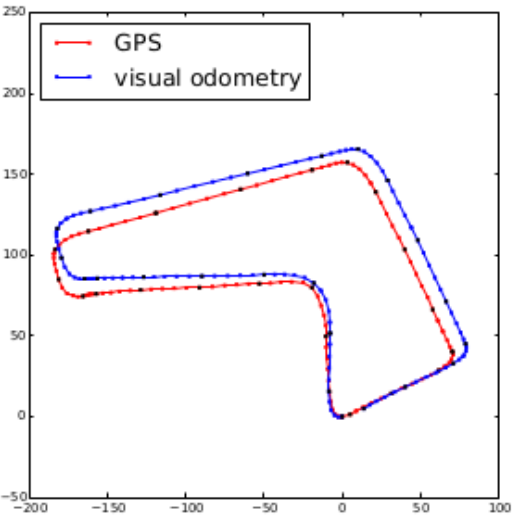
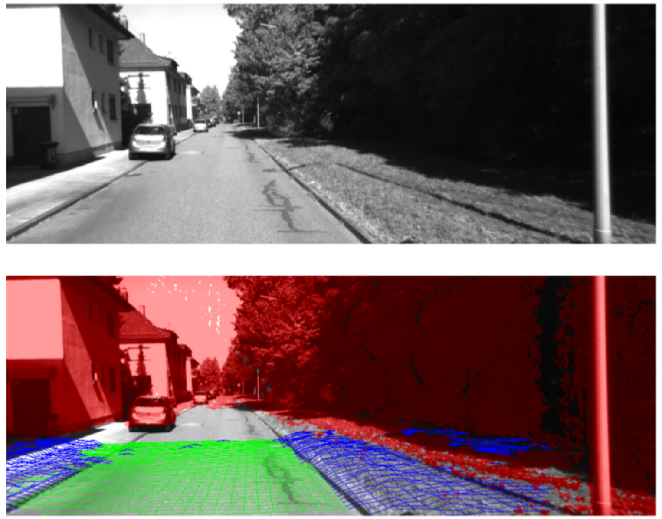
3D rekonstrukcija
-
Rekonstrukciju strukture scene i gibanja kamere
posebno je prikladno provoditi sustavom od dvije kamere:

-
Analizom videa možemo prilično vjerno rekonstruirati gibanje kamere:
-
Analizom pojedinačnih parova slika možemo odrediti
ravninu gibanja, pločnik i potencijalne prepreke:
-
Video:
gibanje,
struktura,
struktura2.
-
Izvori: znanstveni radovi
(pdf,
pdf).