



Izračun ciljane točke
Realno je za očekivati da se dva pravca koja korisnik izabere, neće sjeći, nego mimoilaziti. Zato je potrebno pretpostaviti koju točku je korisnik htio naciljati. Najlogičnije je za tu točku uzeti onu, koja je najmanje udaljena od obadva pravca. Matematičkom intuitivnošću možemo pretpostaviti da se radi o točci koja leži na spojnici okomitoj na obadva pravca. Uzeti ćemo točku sa sredine te spojnice.
Slika 4.1.Dva mimoilazna pravca u prostoru, te njihova najkraća spojnica (plavom bojom).
Postavljamo parametarske jednadžbe dva pravaca u prostoru:
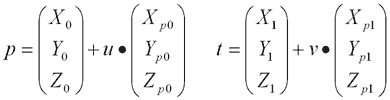
Jednadžba udaljenosti točaka na pravcima:

Deriviranjem udaljenosti D po parametru u, pa po parametru v, dobivamo iznose tih parametara, te konačnu ciljanu točku računamo kao polovište dužine omeđene pronađenim točkama na pravcima p i t.

Izračun automatskog zakretanja kamere
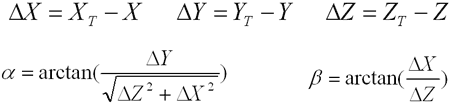
Za izračune koristimo Kartezijev koordinatni sustav. Kao njegovo ishodište uzimamo zglob koji spaja stalak i ruku. Prvo je potrebno izračunati poziciju robotske glave koja ovisi o rotaciji ruke. Pozicija ciljane točke poznata je već otprije, a njen izračun je opisan u prethodnom poglavlju. Nakon što saznamo poziciju robotske glave, možemo izračunati potrebnu rotaciju da bi ona bila usmjerena prema ciljanoj točci (Slika 4.2.)
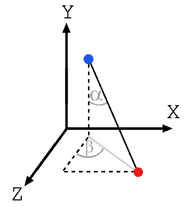
Slika 4.2. Prikaz pozicije robotske glave (plavo) i ciljane točke (crveno).
Algoritam zakretanja kamere
Pseudokod algoritma za zakretanje kamere:
Petlja{
KUT_RUKE=očitaj_kut_ruke();
KUT=izračunaj_kut_kamere(KUT_RUKE, CILJANA_TOČKA);
Pozicioniraj_motore(KUT);
}