ANIMACIJA FIZIKALNO TEMELJENOG MODELA
TKANINE
|
Fizikalni modelČesticeJedan od osnovnih elemenata od kojih se gradi model tkanine su čestice (eng. particle). Čestica je definirana kao točka u prostoru koja ima određena svojstva, a sama ne može predstavljati geometrijsku površinu. U ovom modelu čestice će posjedovati svojstvo mase i nad njima će se simulirati osnovni zakoni dinamike. Opruga
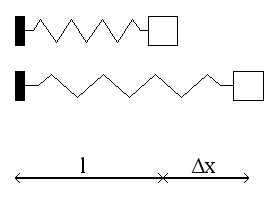
Slika 1. Opruga U
fizici, Hookov zakon elastičnosti je
aproksimacija koja tvrdi da ako neku oprugu rastegnemo za udaljenost
Opruga koja zadovoljava ovu jednakost se naziva linearna opruga, a materijali za koje ona vrijedi se nazivaju linearno elastični materijali. Ako
se opruga koja zadovoljava jednadžbu (1)
pokrene u titranje, ona će oscilirati beskonačno dugo, jer nema
gubitka energije u sustavu. Da bi se riješio taj problem
uvodi se i faktor
prigušenja opruge
gdje je:
Zbrajanjem jednadžbi (1) i (2) dobije se jednadžba koja predstavlja silu opruge:
Model tkanineModel
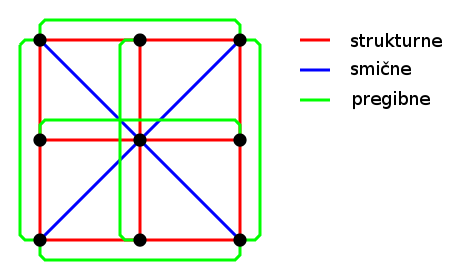
tkanine je mreža koja se sastoji od
Slika 2. Dio mreže modela tkanine Nazivi grupa opruga proizlaze iz njihove namjene u fizikalnom prikazu modela. Pod djelovanjem smičnog opterećenja djeluju samo smične opruge, pod djelovanjem pregibnog opterećenja djeluje samo pregibne opruge, dok pod djelovanjem sažimanja ili rastezana djeluju strukturne opruge. SileUz
činjenicu da se simulira na mreži čestica
dimenzija
Gdje
je Sila
koja djeluje na pojedinu točku ( Unutarnje sile modelaUnutarnja sila modela je sila kojom opruge djeluju na točke mase koje se nalaze na njenim krajevima. Ona je definirana sumom Hookovog zakona (1) i jednadžbe titranja opruge (2).
gdje je:
U jednadžbi (5) prva suma predstavlja sumu svih sila koje nastaju djelovanjem opruge, pomaknute iz ravnotežnog položaja, spojene između dvije čestice, dok druga suma predstavlja silu prigušenja nastala promjene dužina opruga. Vanjske sile modelaU vanjske sile ulaze sile gravitacije i sile koje prouzrokuje protok fluida konstantne brzine (npr. vjetra). Sila
gravitacije na svaku česticu
gdje je:
Sila
koju stvara protok fluida na česticu
gdje je:
Simulacija modelaPrimjenom
gore navedenih jednadžbi moguće
je izračunati vektor ukupne sile koja djeluje na pojedinu česticu
Pošto je za svaku česticu poznata njena masa, iz vektora sile se može primjenom drugog Newtonovog zakona (4) izračunati vektor ubrzanja pojedine čestice:
|
 .
. .
.