ANIMACIJA FIZIKALNO TEMELJENOG MODELA
TKANINE
|
Programska implementacijaIzvedba aplikacijeAplikacija je pisana u C++ programskom jeziku korištenjem Microsoft Visual Studio 2005 razvojnog sučelja. Za iscrtavanje simulacijskog dijela je korištena OpenGL biblioteka, dok je za razvoj korisničkog sučelja korištena wxWidgets biblioteka (http://www.wxwidgets.org). wxWidgets je besplatna datoteka pisana u C++ razvojnom jeziku, a karakteriziraju je otvorenost izvornog koda i više-platformska podrška. Za učitavanje ulaznih datoteka u XML obliku korištena je libXml2 biblioteka (http://xmlsoft.org), dok su za učitavanje 3D modela zapisanih u 3DS datotečnom obliku, te učitavanje slika zapisanih u nekoliko oblika korištene biblioteke lib3DS (http://lib3ds.sourceforge.net), te DevIL (http://openil.sourceforge.net). Za potrebe otkrivanja kolizije korištena je SOLID biblioteka (http://www.dtecta.com). Simulacijski model
Slika 6. Model implementacije simulacijskog okruženja Geometrijski objektiPrilikom programske implementacije geometrijskih objekata ostvareno je virtualno sučelje Entity koje sadrži podatke zajedničke svim tipovima geometrijskih objekata. Podatci zajednički svim objektima su naziv geometrijskog objekta, te matrica transformacije. Naziv objekta je niz znakova koji korisniku omogućuje jednostavnije razlikovanje objekata u sceni, dok je matrica transformacije matrica brojeva s pomičnim zarezom jednostruke preciznosti dimenzija 4x4 kojom se definira položaj i orijentaciju pojedinog geometrijskog objekta unutar okruženja. Matrica transformacije je zapisana kao jednodimenzionalno polje od 16 brojeva jednostruke preciznosti u OpenGL obliku zapisa. U programskoj implementaciji su definirana dva različita tipa geometrijskih objekata. To su geometrijski objekt tkanine i čvrsti geometrijski objekt. Geometrijski objekt tkanine se mijenja prolaskom vremena simulacije, dok čvrsti objekt zadržava svoju početnu definiciju kroz simulaciju. Sukladno tome, treba se pokloniti određena pažnja prilikom modeliranja strukture podataka za pojedini tip geometrijskih objekta. Geometrijski objekt tkanineProgramski objekt koji sadrži informacije o geometrijskom objektu tkanine je implementiran kao proširenje virtualnog sučelja Entity. Uz informacije koje su definirane u tom sučelju potrebno je da ovaj objekt sadrži i podatke koje opisuju sam objekt tkanine. Te informacije su koeficijent unutarnjeg prigušenja, struktura čestica i njihova međusobna povezanost oprugama. Koeficijent unutarnjeg prigušenja je zapisan kao jedan broj s pomičnim zarezom, dok su za definiciju čestica i opruga korištene posebne strukture podataka. Struktura podataka za opis čestice ima slijedeću definiciju u C++ programskom jeziku: struct structVertex
{ Opis sadržaja strukture čestice:
Struktura podataka za opis opruge ima slijedeću definiciju u C++ programskom jeziku: struct structSpring { Opis sadržaja strukture opruge:
Da bi bilo moguće prikazati tkaninu pomoću OpenGL grafičke biblioteke potrebno je geometriju tkanine prikazati kao skup trokuta. Svaki trokut koji je potrebno iscrtati je predstavljen kao popis od tri čestice zapisane svojim rednim brojem u polju čestica. struct structTriangle { Prilikom iscrtavanja objekta tkanine koriste se mogućnosti osvjetljenja i glatkog modela sjenčanja OpenGL biblioteke, što omogućava detaljniji prikaz geometrijskih objekata. Za implementaciju toga potrebno je, zajedno s pozicijom čestice tkanine, OpenGL biblioteci proslijediti i informaciju o normali na površinu u toj točci. Normale čestica se izračunavaju prije svakog iscrtavanja za slučaj da je došlo do promjene geometrije tkanine.
Slika 7. Orijentacija trokuta i njegova normala Geometrijska
definicija trokuta je prikazana
na slici 7. Kako je svaki trokut zadan s tri pozicije čestice (
Jedna čestica može biti vrh više trokuta, te se za izračun njene normale moraju uzeti u obzir normale svih tih trokuta. Konačna vrijednost normale u čestici se dobije normalizacijom sume normala svih trokuta kojima zadana čestica predstavlja jedan od vrhova:
gdje je:
Informacije o strukturi čestica i opruga su zapisane u obliku kontinuiranih polja gore opisanih struktura. Takav način zapisa omogućuje jednostavan i brz pristup bilo kojem elementu polja koristeći samo njegov redni broj u polju. Struktura podataka za opis podataka tkanine ima slijedeću definiciju u programskom jeziku C++: struct clothData { Opis sadržaja gornje strukture:
Čvrsti geometrijski objektProgramski objekt koji sadrži informacije o čvrstim geometrijskim objektima je također implementiran kao proširenje virtualnog sučelja Entity. Pozicioniranje objekta se postiže postavljanjem transformacijske matrice definirane u Entity sučelju. Prilikom učitavanja geometrijskog objekta iz 3DS datoteke kreira se OpenGL prikazna lista (eng. display list) koja se koristi za iscrtavanje objekta, te se za potrebe razrješavanja sudara pohrane vrijednosti točaka i normala koje definiraju geometriju objekta. SimulacijaSvaka simulacija započinje iz nekog unaprijed definiranog stanja mirovanja. U tom stanju je brzina svake pojedine čestice tkanine jednaka nula, a njihov smještaj u krajnjem geometrijskom sustavu je definiran kao kombinacija njihovog smještaja u referentnom geometrijskom sustavu objekta te transformacijske matrice koja objekt tkanine preslikava u krajnji geometrijski sustav. Zbog pojednostavljenja implementacije potrebno je, prije početka simulacije, sve čestice objekata tkanine preslikati u krajnji geometrijski sustav tako što se svaki pojedini vektor koji definira njihovu poziciju u geometrijskom sustavu objekta tkanine transformira matricom transformacije pojedinog objekta. Svaka operacija simulacije se dalje provodi na objektima tkanine definiranima u krajnjem geometrijskom sustavu. Proces simulacije se
dalje provodi
pojedinačno za svaki okvir (eng. frame) animacije. U tome procesu se na
osnovu trenutnog stanja u sustavu i u ovisnosti o vremenskom intervalu
proteklom između dva okvira određuje novo stanje sustava. Vremenski
interval protekao između dva okvira animacije se koristi kao korak
Slika 8. Raspodjela vremenskih odsječaka pri simulaciji u stvarnom vremenu Na slici 8 je primjer
simulacije u stvarnom
vremenu, na kojoj Proces simulacije se
provodi rješavanjem dviju
diferencijalnih jednadžbi prvog stupnja za svaku česticu u
geometrijskom
objektu tkanine. Da bi se moglo pristupiti rješavanju
diferencijalnih jednadžbi
potrebno je prvo odrediti iznose sila koje djeluju u sustavu čestica i
opruga. Prilikom računanja stanja sustava u novom koraku Nakon izračuna sila za pojedinu česticu potrebno izračunati ubrzanje točke (9), te numeričkom metodom rješavanja dviju diferencijalnih jednadžbi (10) odrediti njen novi položaj uzimajući u obzir mogućnost postojanja sudara s čvrstim objektima u simulacijskom okruženju. Eulerova integracijaEulerov algoritam je
najjednostavniji
algoritam za numeričku integraciju diferencijalne jednadžbe. Pri
izračunu stanja u koraku
gdje je:
Da bi odredila stanje na kraju vremenskog odjeljka ova metoda numeričke integracije koristi informaciju o stanju s početka odjeljka. Runge-Kutta integracijaZa implementaciju Runge-Kutta metode numeričke integracije je uzeta metoda četvrtog stupnja prikazana formulama (49). Kako je potrebno izračunati rješenja dviju diferencijalnih jednadžbi prvoga stupnja, potrebno je dva puta primijeniti Runge-Kutta metodu. Uvrštenjem jednadžbi (10) u skup jednadžaba odabrane Runge-Kutta metode dobiva se skup jednadžbi koji predstavljaju rješenje diferencijalne jednadžbe i određuje stanje tkanine u novom koraku simulacije.
gdje je:
Razrješavanje sudaraZa otkrivanje sudara u simulaciji korištena je biblioteka SOLID (http://www.dtecta.com) čija je svrha provođenje ispitivanja presijecanja i utvrđivanje blizine između geometrijskih objekata. Izvorni kod biblioteke je otvoren, pa je moguće izvest bilo kakve potrebne promjene. Za rad s bibliotekom SOLID potrebno je definirati okruženje nad kojim će se vršiti ispitivanje sudara. Svaki objekt koji se želi uključiti u ispitivanje sudara se mora definirati kao zaseban objekt unutar toga okruženja. Za svaki čvrsti geometrijski objekt se definira novi objekt unutar okruženja biblioteke za otkrivanje sudara koji se koriti za razrješavanje sudara između objekta tkanine i čvrstog objekta. Biblioteka SOLID omogućuje dva različita pristupa problemu razrješavanja sudara između objekata. Prvi način je da se za svaki objekt definira funkcija za razrješenje koju će sama biblioteka zvati u slučaju sudara, dok je drugi način ispitivanje presjecišta proizvoljno zadane zrake s objektima u ispitivanom okruženju. Prilikom testiranja oba načina rada pokazalo se da je drugi način jednostavniji za implementaciju, a uz to ima i puno bolje vremenske performanse. Otkrivanje sudara se
provodi za pomak svake čestice
pojedinačno. Nakon što se numeričkom metodom izračuna nova
pozicija čestice koristeći funkcionalnost SOLID biblioteke provjerava
se da li dužina određena prijašnjom i sadašnjom
pozicijom siječe neki
objekt u okruženju nad kojim se provodi ispitivanje sudara. U slučaju
da
dođe do presijecanja, SOLID biblioteka može dati informaciju o poziciji
točke sjecišta dužine i čvrstog objekta, te normalu
površine
čvrstog objekta u točki sjecišta. Normala
površine čvrstog
objekta je definirana u krajnjem geometrijskom sustavu i uvijek
pokazuje prema
početnoj točki ispitne dužine, dok je mjesto presijecanja definirano
parametrom
gdje je:
Prvotna ideja je bila da se razrješenje sudara može izvršiti tako da se nova pozicija čestice koja je izazvala sudar postavi na samu površinu objekta s kojim se sudarila.
gdje je:
Međutim, s ovim rješenjem se javlja problem da na česticu i nakon prvotnog sudara djeluju sile, te se ona pomiče po samoj površini objekta. Nakon nekog vremena će, zbog nepreciznosti otkrivanja sudara u implementaciji biblioteke SOLID, čestica proći kroz čvrsti objekt bez da izazove sudar. Taj problem je prikazan na slici 9. Da bi se sudar uspješno razriješio, implementirano je rješenje koje česticu, u slučaju sudara, vraća na poziciju koju je imala prije početka simulacijskog koraka:
Kako je, zbog preciznosti
integracije,
poželjno imati što manji korak simulacije
Slika 9. Problemi s razrješenjem sudara nastalih zbog nepreciznosti otkrivanja sudara Nakon promjene pozicije čestice koja je sudjelovala u sudaru potrebno je promijeniti i iznos njene brzine, jer smo skratili put koji je čestica prešla u istom vremenskom intervalu, što se u ovome slučaju vrlo jednostavno postiže postavljanjem njene vrijednosti na nulu. Kako se u ovoj implementaciji otkrivanja i razrješenja sudara gleda samo putanja čestice, lako je moguće da, iako sama čestica na svome putu ne presječe niti jedan čvrsti objekt, trokut kojem ona pripada presječe čvrsti objekt, a ova metoda ne registrira taj sudar.
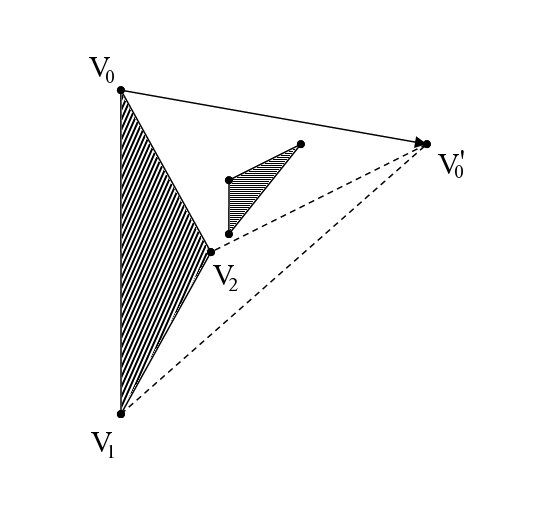
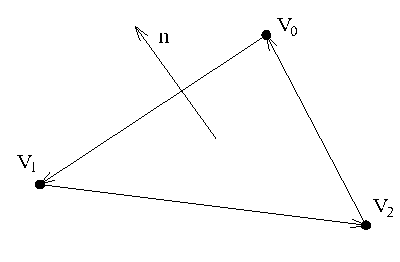
Slika 10. Pojava greške prilikom otkrivanja sudara Na slici 10 se može
vidjeti primjer nastajanja
greške prilikom otkrivanja sudara. U ovom slučaju je trokut
tkanine
prikazan kao veći osjenčani trokut određen vrhovima V0,
V1 i V2, a trokut koji predstavlja čvrsti objekt je
prikazan kao manji osjenčani trokut. Prilikom jednog koraka simulacije
vrh
V0 promjeni položaj u položaj označen kao V0', a
trokut tkanine poprimi položaj definiran vrhovima V0', V1
i V2 prikazan isprekidanim linijama. Prilikom promjene položaja
trokuta tkanine je došlo do prolaska tog trokuta kroz trokut
čvrstog
objekta, ali se taj sudar nije otkrio. Do otkrivanja sudara nije
došlo zato što
se gornji algoritam otkrivanja sudara zasniva na traženju
presjecišta putanje
čestice i čvrstih objekata, a u ovom primjeru ne dolazi do presijecanja
čvrstog tijela dužinom
Slika 11. Prikaz čvrstog objekta i pripadajućeg objekta za ispitivanje sudara Na slici 11 je prikazana geometrija jednog čvrstog objekta. Ožičenjem je prikazan objekt definiran u okruženju SOLID biblioteke koji će se koristiti za otkrivanje sudara. Prilikom simulacije se pojavljuje gore opisani problem kod detekcije sudara pa na nekim mjestima dolazi do prodiranja čvrstih objekata kroz objekt tkanine.
Slika 12. Prikaz greške otkrivanja sudara Na slici 12 je prikaz gore opisane greške koja nastaje prilikom otkrivanja sudara čestica s geometrijom čvrstog objekta. Prilikom simulacije neke od čestica nisu ostvarile kontakt s čvrstim objektom već su došle u takvu poziciju da djeluje kao da je čvrsti objekt čajnika probio kroz tkaninu. Ovaj problem se može izbjeći promjenom geometrije definirane za otkrivanje postojanja sudara. Prilikom učitavanja
geometrije
čvrstog tijela iz 3DS datoteke dostupne su informacije o točkama koje
definiraju geometrijski objekt, te informacije o normalama na
površinu u
određenoj točci. Ako se pretpostavi da svaka točka ima samo
jednu normalu, tj. Kontinuiranu prvu derivaciju, može se kreirati novi
geometrijski objekt koji će imati istu strukturu kao izvorni objekt,
ali
će svaka točka biti pomaknuta u smjeru pripadajuće normale za
neki unaprijed zadani faktor
gdje je:
Takvim postupkom se definira novi geometrijski objekt koji će se koristiti samo pri otkrivanju sudara, dok se u iscrtavanju koristi izvorni objekt.
Slika 13. Prikaz
čvrstog objekta i pripadajućeg objekta za ispitivanje sudara uz
faktor proširenja
Slika 14. Prikaz izbjegavanja greške prilikom otkrivanja sudara Na slici 14 se može
primijetiti da je su
rezultati dobiveni ovakvom metodom otkrivanja sudara puno
prihvatljiviji od
prijašnjih rezultata, ali su i sami izvor dodatnih problema.
Za primjer na slici
14 je izabran faktor proširenja od
Slika 15. Greška nastala zbog istog faktora proširenja korištenog na cijelom objektu Drugi problem ovog načina implementacije je taj da jedino radi na geometrijskim objektima koji zadovoljavaju uvjet da su C1 neprekinuti, tj. da svaki vrh ima jednu normalu. Problem se može prikazati na geometrijskom objekta koji je samo C0 neprekinut.
Slika 16. Geometrijsko proširenje C0 kontinuiranog objekta Kako je piramida na slici 16 C0 neprekinuti geometrijski objekt znači da kod nje postoje vrhovi s više od jedne normale. Kod piramide svaki vrh stranice ima onoliko normala koliko se stranica u njemu dodiruje. Ako se ovaj objekt proširi, dobije se objekt koji je potpuno beskoristan pri otkrivanju sudara.
|
 ,
,
 ,
,