-
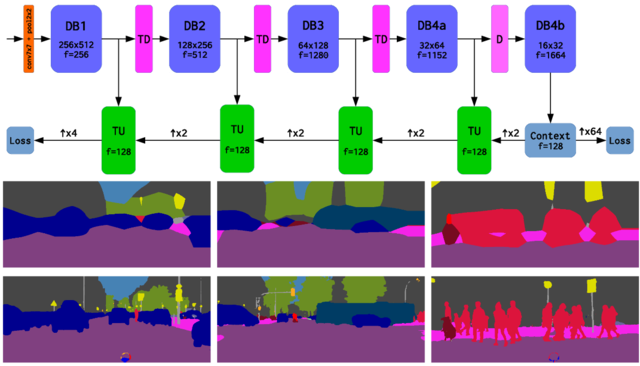
We apply the inverse perspective transform
to the semantic map recovered by
Ladder-DenseNet-121
(74.3 mIoU, 7.5Hz on Titan X).
-
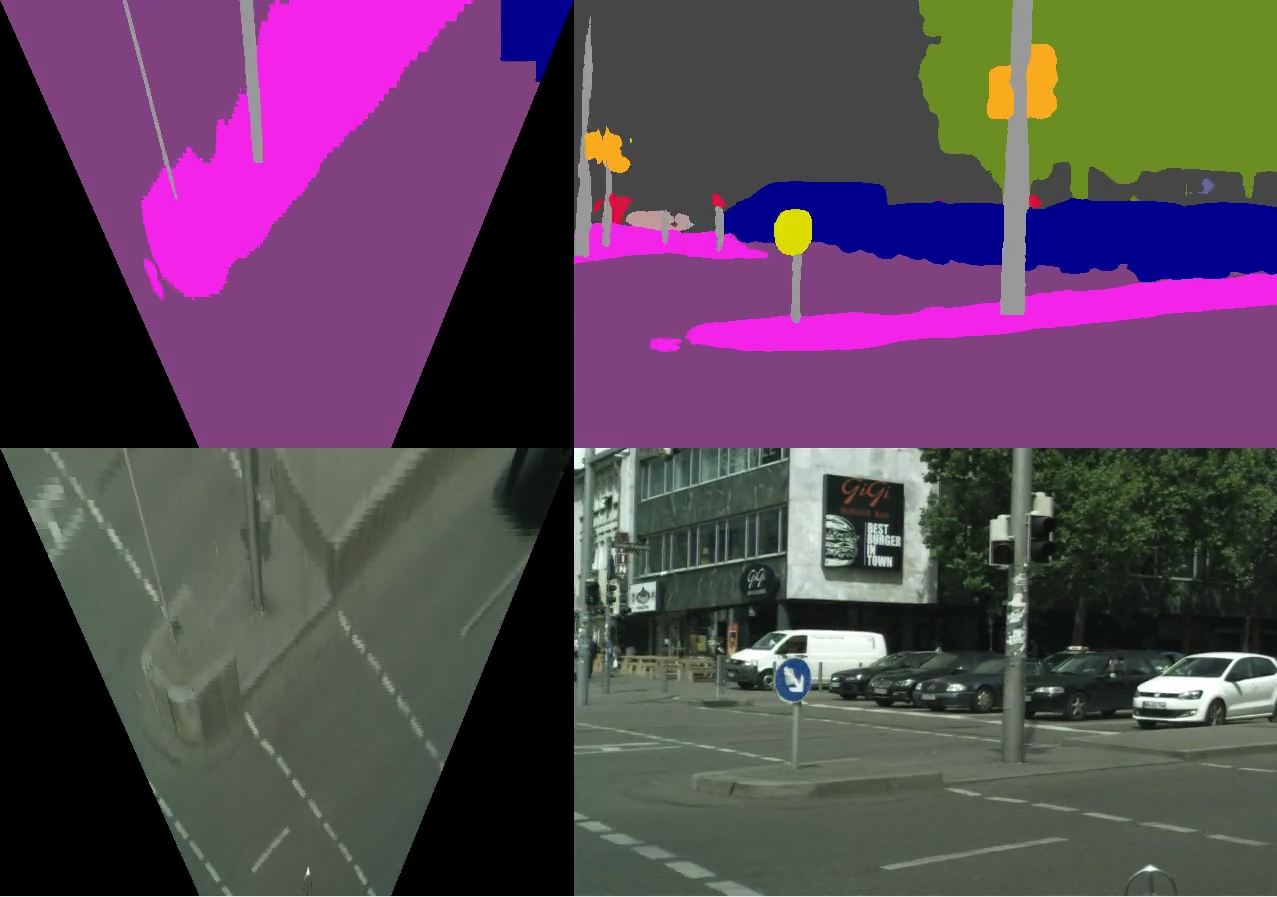
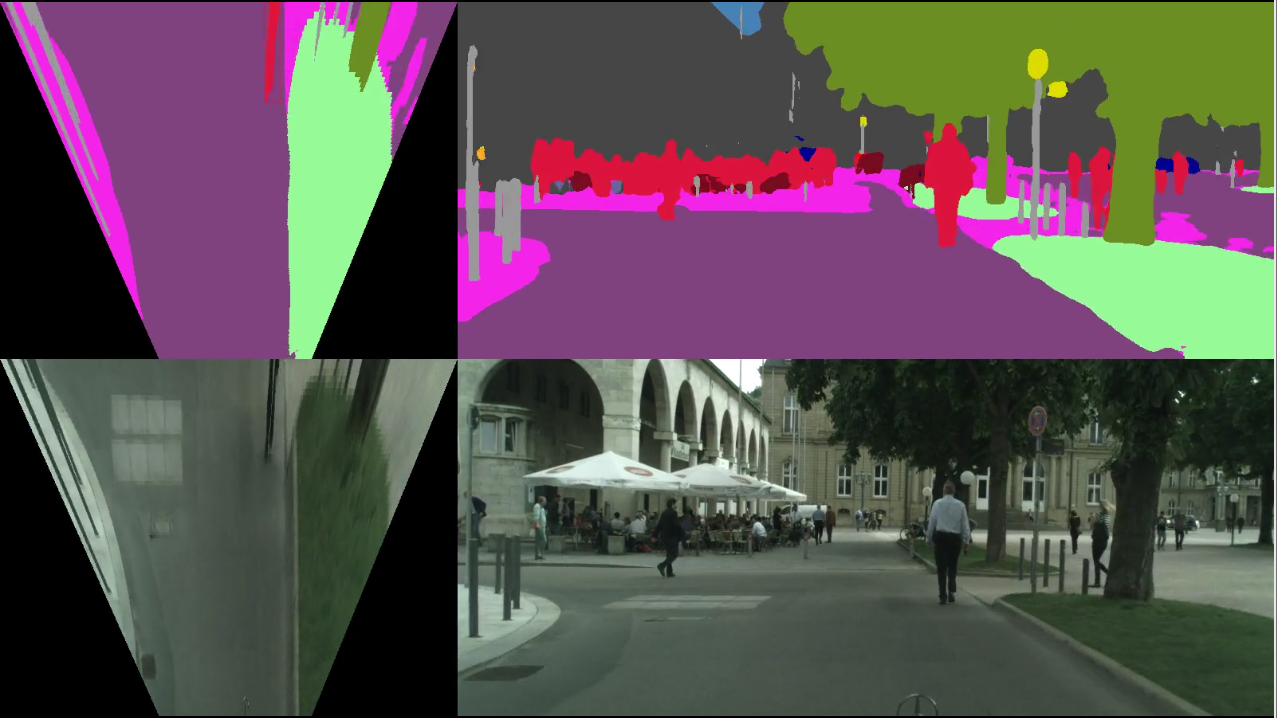
the resulting bird-eye semantic view
(top-left subfigure in both figures on the right)
allows to detect drivable parts of the environment
-
the
technique
could support the following reasoning within
an autonomous driving system
-
the vehicle can navigate over
purple regions in the map (road)
-
exceptionally, the vehicle can
prudently drive over pink and light green
regions in the map (sidewalk, terrain)
-
all other colours represent various kinds of obstacles
(pedestrians, cars, etc.)
|
|