-
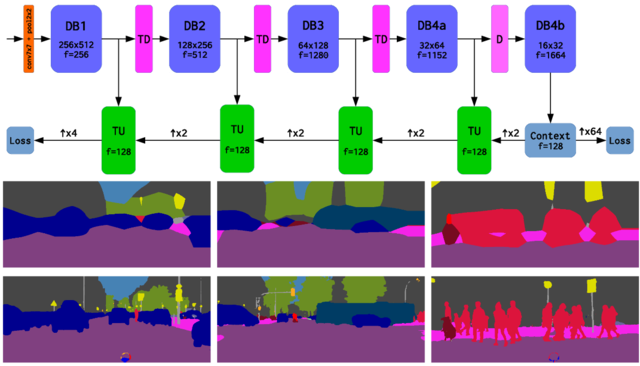
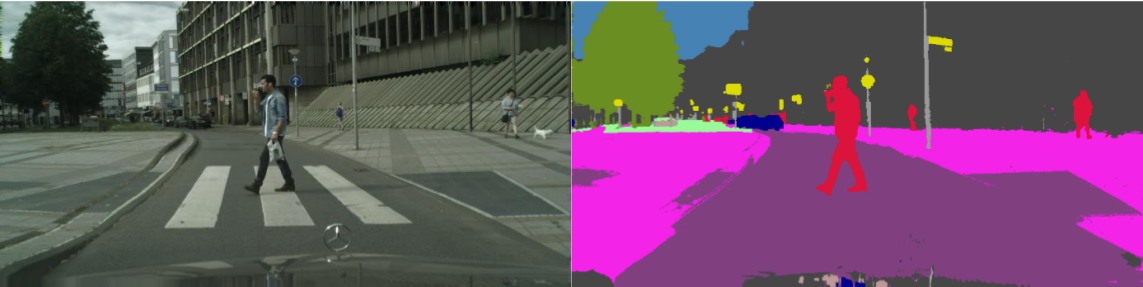
na semantičke mape izlučene modelom
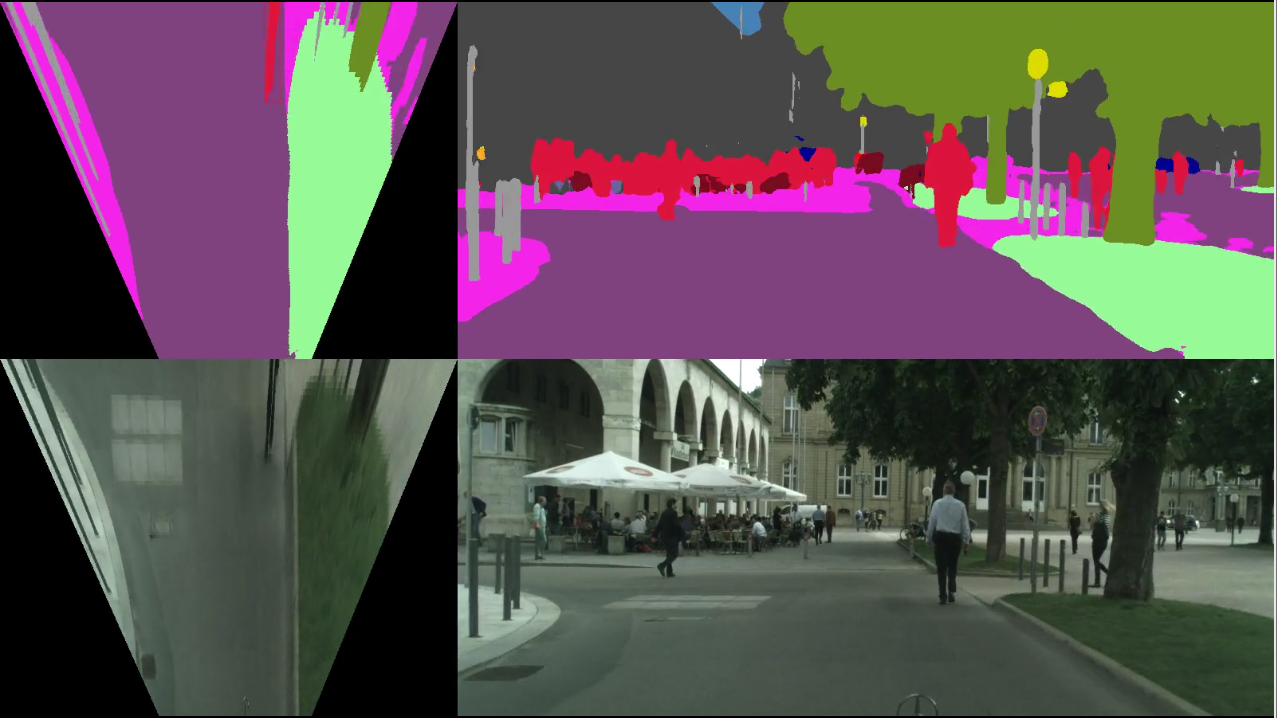
Ladder-DenseNet-121
(74.3 mIoU, 7.5Hz na Titanu X)
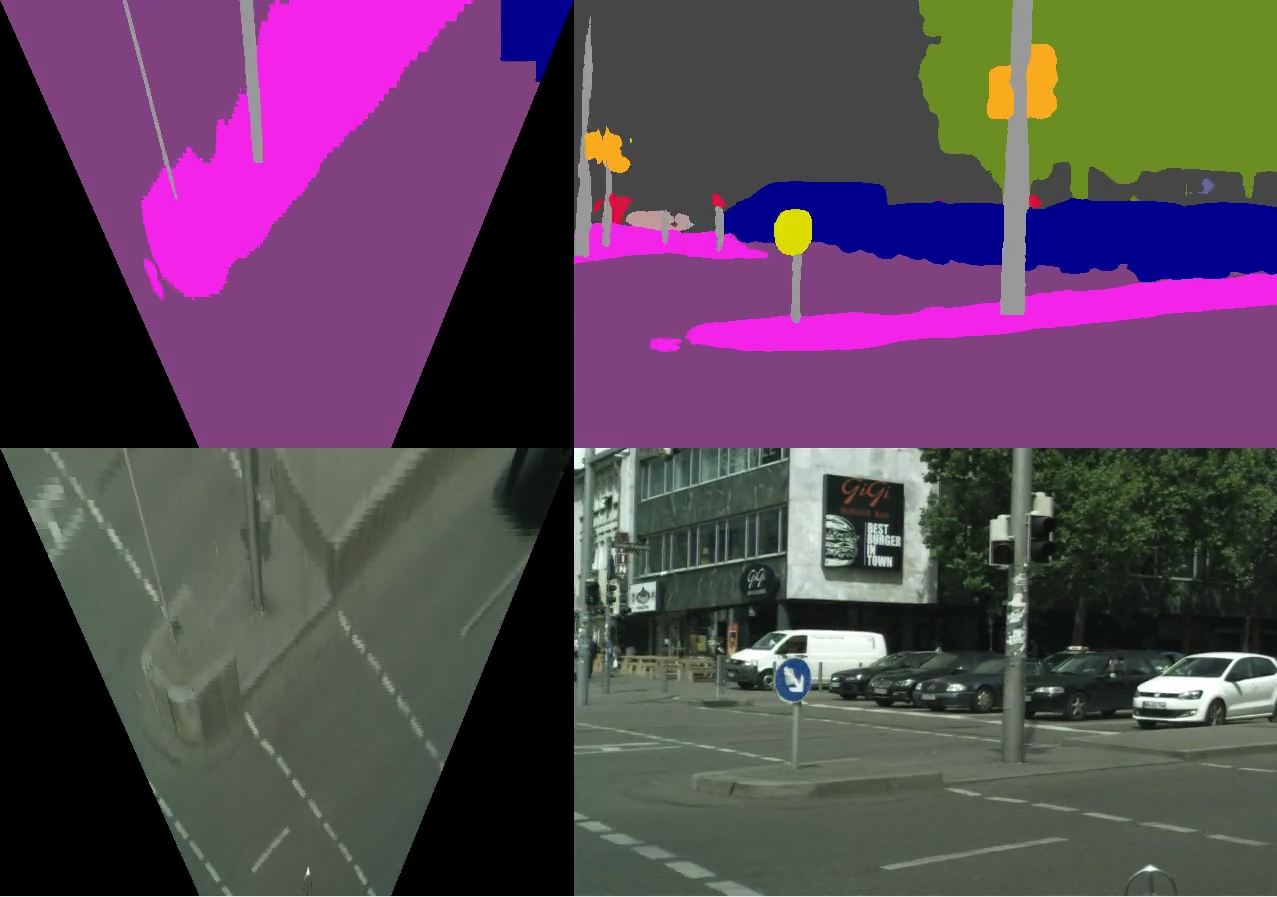
primijenili smo
inverznu perspektivnu transformaciju
-
tako dobiveni semantički pogled iz ptičje perspektive
(podslika gore-lijevo u obje slike desno)
omogućava određivanje dijelova scene
po kojima je moguće voziti
-
ova
tehnika
mogla bi podržati sljedeće zaključke
u sustavu za autonomnu vožnju:
-
autonomni automobil se može slobodno kretati
po ljubičastim dijelovima karte (cesta)
-
iznimno, automobil može oprezno voziti
i po ružičastim i svijetlo zelenim
dijelovima karte (pločnik, teren)
-
sve ostale boje predstavljaju prepreke
(osobe, automobili, bicikli, itd.)
|
|