KLONIRANJE
IZRAZA LICA - POSTUPAK |
KLONIRANJE
IZRAZA LICA - POSTUPAK |
PRINCIPI INTERPOLACIJE Neprekinuta funkcija f(x) može se aproksimirati funkcijom F(x, w) uz prigodni izbor vektora parametara w, gdje su x i w realni vektori. Pronalaženje vektora parametara w se zove još i “učenje” u kontekstu neuro-mreža. U fazi učenja cilj je odrediti vektor w uz zadanu aproksimacijsku funkciju F i skup početnih primjera, koji najbolje aproksimiraju funkciju f. Radij-funkcije se često koriste kao aproksimacijska funkcija F zbog toga što vrlo dobro aproksimiraju glatke površine u višedimenzijskom prostoru uz bilo koji početni skup točaka. Radij-funkcije su radijalno simetrične oko točke u prostoru. Najčešće korištena radij-funkcija je Gaussova funkcija h(r) = exp (-r/c)^2. Njena karakteristika je da konvergira prema nuli za veliki r. Zbog toga je njen oblik prilično predvidljiv čak i ako postoje velike razlike između skupa točaka za učenje i ulaznog skupa točaka. Osim nje često se koristi i Hardyjeva funkcija h(r) = sqrt(r^2+c^2). Na nju raspored ulaznih točaka ne utječe u velikoj mjeri, te su površine konstruirane njome izrazito glatke. Još postoje i thin-plate spline funkcija h(r) = r^2 log(r) i linearna funkcija h(r) = r koja je najjednostavnija, ali često u praksi neupotrebljiva.
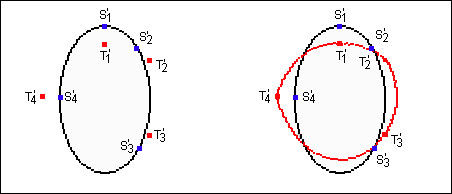
Pretpostavimo da imamo skup početnih tocaka S (dimenzije m) i definirane vektore pomaka n točaka iz tog skupa (točke si’; i=1,...,n). Te točke preslikavaju se prema vektorima pomaka u točke ti’; i =1,…,n). Cilj nam je definirati vektore pomaka za sve ostale točke iz skupa S u ovisnosti o vec definiranim prijelazima početnih točaka (skupa za učenje). Taj postupak naziva se interpolacija razasutih podataka.
Na slici su crnom bojom iscrtane točke iz početnog skupa S. Sa s1’ do s4’ označene su početne točke iz skupa za učenje koje se preslikavaju u točke t1’ do t4’. U desnom dijelu slike crvenom bojom su iscrtane točke ciljnog skupa T dobivene interpolacijom s radij-funkcijama od početnog skupa S. Prvo definiramo oznake koje ćemo koristiti u slijedećem izvodu: S
– početni skup (dimenzije m) Funkcija f koju aproksimiramo bit će oblika:
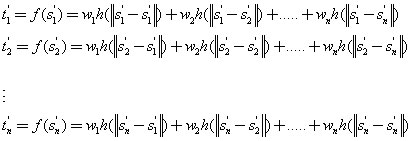
Sa cj označavamo centre radij-funkcije h. Budući da se u najjednostavnijem slučaju za centre funkcije uzimaju upravo točke iz početnog skupa za ucenje, gornja formula prelazi u:
Zadatak nam je izračunati težinske koeficijente funkcije, tj. w. Da bi nam to bilo moguće, moramo prvo izabrati proizvoljnu funkciju h(r). Iz proizvoljnosti funkcije h slijedi da funkcija f nije jednoznačna i njena uspješna izgradnja umnogome će ovisiti o izboru funkcije h. Iz jednadžbe:
možemo postaviti sustav jednadžbi:
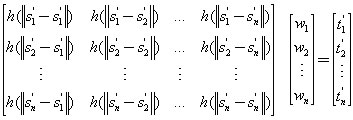
Dobili smo sustav n jednadžbi sa n nepoznanica. Ukoliko ga prikažemo u matričnom obliku dobit ćemo slijedeću sliku:
Važno je primijetiti da su elementi na dijagonali matrice jednaki 1, zbog svojstva radij-funkcija da je h(0) = 1. Ostali elementi biti će manji od 1, ovisno o udaljenosti točaka. Ukoliko uvedemo oznake Hi,j za matricu funkcija h(r), w za vektor težinskih vrijednosti i t’ za vektor ciljnih točaka u skupu za učenje dobit ćemo:
Da bi gornja jednadžba bila rješiva, matrica Hi,j mora imati inverz. Množenjem s inverznom matricom (Hi,j )-1 sa lijeve strane, dobivamo:
Invertiranu matricu možemo dobiti na nekoliko različitih načina npr. Gaussovom metodom eliminacije ili LU, odnosno LUP dekompozicijom.
|