|
|
Oblikovanje i prikaz modela ulančanih kinematičkih
struktura (Studentski projekt)
|
||
|
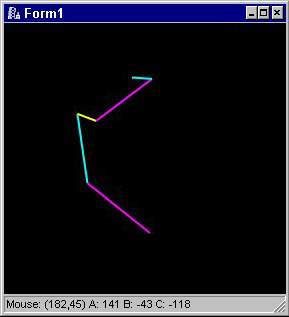
Faza I: Izrada modela i prikaz
pokreta jednostavnog dvo-dimenzijskog kinematičkog lanca
|
||
|
|
Oblikovanje i prikaz modela ulančanih kinematičkih
struktura (Studentski projekt)
|
||
|
Faza I: Izrada modela i prikaz
pokreta jednostavnog dvo-dimenzijskog kinematičkog lanca
|
||