Faza II:
Vezanje unaprijedne i inverzne
kinematike za model izrađen u prvoj fazi
Izrada modela i prikaz pokreta
jednostavnog dvo-dimenzijskog kinematičkog lanca.
Načinjena je implementacija inverzne kinematike na jednostrukom kinematičkom
lancu za slučaj dvodimenzijskog kinematičkog lanca. Isprobani su različiti
algoritmi i odabran je CCD algoritam zbog postavljenih vremenskih ograničenja.
Proučena je povezanost grafičkog standarda OpenGL s programskim jezikom
Java. Načinjena je implementacija prikaza jednostrukog kinematičkog
lanca u programskom okruženju Java.
Prikazi rezultata izvođenja
programa:
Program je načinjen kao Java
applet uz korištenje OpenGL-a. Može se pokrenuti preko mreže ako se
prethodno instalira GL4Java:
http://www.jausoft.com/Files/Java/1.1.X/GL4Java/Installer/
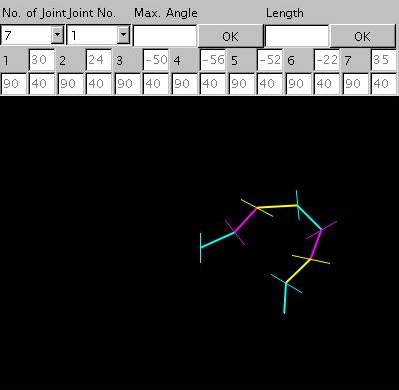
Prikazanim jednostrukim kinematičkim
lancem može se interaktivno upravljati upotrebom miša.
Također je moguće promijeniti broj segmenata u prvom polju s lijeva.
Drugo polje određuje trenutno aktivni zglob za koji se definira maksimalni
otklonski kut i duljina segmenta aktivnog zgloba. Ostali parametri vezani
uz zglobove prikazani su u donjem retku. Kako pomičemo lanac polja će
prikazivati trenutni otklonski kut za svaki zglob i postavljene parametre
svakog zgloba. Dostupan je i izvorni kod programa.
Java
applet za jednostruki kinematički lanac
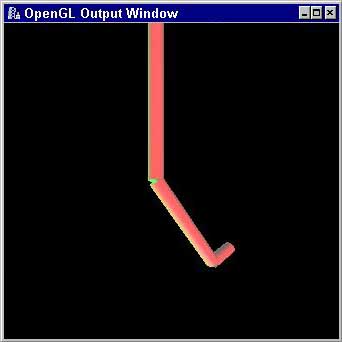
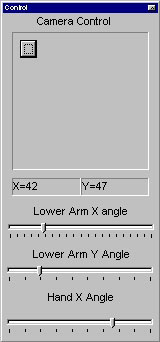
Druga inačica progarma
- rezultati izvođenja:
|