|
Opis algoritama i struktura podataka
Klasična metoda
Kod klasične metode detekcije sudara, potrebno je provjeriti za svaki od n objekata u sceni da li je u
koliziji sa ostalih n-1 objekata. Dakle, ukupno je za koliziju potrebno provjeriti: n*(n-1)/2 parova. Čak i kad
je test kolizije trivijalan, kao što je slučaj kod kugli, to postaje problem pri velikom broju objekata.
Npr. Kod 10.000 pokretnih objekata na sceni potrebno je za koliziju ispitati gotovo 50 milijuna parova,
i tako u svakom koraku simulacije.
BSP stablo
BSP stablo je struktura podataka koje se može koristi kod pretrage i sortiranja objekata u n-dimenzionalnom
prostoru. Stablo kao cjelina predstavlja cijeli prostor, a svaki čvor predstavlja konveksni dio tog prostora.
Svaki čvor (osim krajnjih čvorova – listova) ima hiper-ravninu koja dijeli prostor koji predstavlja na dvije
polovine. Svaki čvor također sadrži i reference na ta dva nova čvora. BSP stablo se najčešće koristi u 2D ili
3D prostoru. U tim slučajevima hiper-ravnine su zapravo pravci i ravnine.
BSP stablo se u širokoj fazi detekcije sudara koristi u svrhu smanjenja potencijalnih kolizijskih parova
koje treba evaluirati. Koliko to smanjenje iznosi, ovisi o dubini samog stabla i uspješnosti odabira što boljih
ravnina podjele. Poželjno je da ravnina podjele dijeli prostor na pola, tj. da je sa obje njene strane jednak broj
objekata. Također je poželjno da je redundancija pri tome što manja, tj. da je što manji broj objekata koji se
nalaze sa obje strane ravnine podjele (zbog toga što ih ravnina siječe).
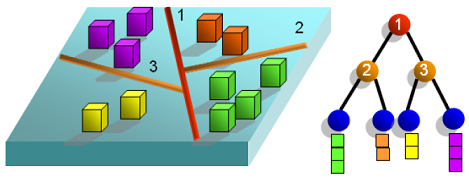
Slika 1. Podjela prostora BSP stablom i samo stablo.
|
Na slici 1 je pomoću BSP stabla dubine 2 broj potencijalnih kolizijskih parova smanjen sa 55 na 11.
Kod većeg broja objekata, dobitak je još veći. Tako, npr. dok kod 10.000 objekata klasičnom metodom imamo oko 5
milijuna parova, uz idealnu podjelu objekata unutar BSP stabla dubine 9, broj parova je približno 50 puta manji.
Glavni nedostatak BSP stabla u primjeni kod široke faze detekcije sudara u dinamičnim scenama je taj što se
raspored objekata u sceni tijekom vremena mijenja, te početno BSP stablo, koje je statična struktura, ne daje jednaki
faktor ubrzanja kao što je davalo na početku. Zbog toga su potrebna proširenja BSP stabla, koja ga prilagođavaju
promjenjivom rasporedu objekata na sceni.
Samo-podesivo BSP stablo
Sve što je rečeno za BSP stablo u prošlom dijelu vrijedi i za samo-podesivo BSP stablo. Jedini dodatak je
taj što se nad BSP stablom periodički, nakon vremena T, izvodi funkcija podešavanja BSP stabla. Ona prilagođava
oblik stabla novom rasporedu objekata u sceni, kako bi se dobio što bolji raspored objekata po listovima stabla.
Potrebno je vršiti balans između želje za odabirom što boljih ravnina podjele i cijene funkcije kojom se
takve ravnine biraju, zbog toga što će se ta funkcija vrlo često pozivati tijekom izvođenja simulacije. Zbog toga,
i dodatnih pojednostavljenja koja takva odluka donosi, moguće ravnine podjele sam limitirao na x-y, y-z te x-z
ravnine.
Stablo kod kojeg su ravnine podjele limitirane na taj način se zove kd-stablo (eng. kd-tree, k-dimensional-tree)
i ono je specijalni slučaj BSP stabla, no u nastavku ću koristiti isključivo naziv BSP stablo.
Kod samo-podesivog BSP stabla svakih T = 0,2s se vrši podešavanje stabla. Ono se sastoji od balansiranja
čvorova koji su nebalansirani, tj. odabira novih ravnina podjele za takve čvorove. Čvor se smatra nebalansiranim ako
je omjer objekata sa jedne i druge strane njegove ravnine podjele manji od 0,5 (ili recipročno,veći od 2,0).
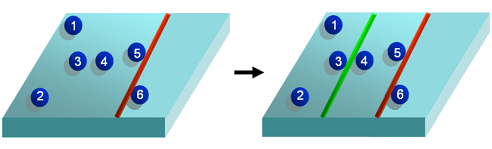
Slika 2. Lijevo – nebalansirani čvor; Desno – nova os balansira čvor.
|
Kod podešavanja stabla, u sve čvorove stabla koji nisu listovi se spremaju objekti, i kada se usporedbom broja
objekata utvrdi da neki čvor nije balansiran, za njega i njegovu djecu se odabiru nove osi podjele. Na slici 2
se može vidjeti kako radi funkcija balansiranja čvora u 2D. Kako navedeni čvor ima samo 2 lista,
balansiranje je završeno. Detalji o implementaciji samog stabla i balansiranja se mogu pogledati u diplomskom radu
koji se može preuzeti sa ove stranice.
Algoritam brojenja parova i pojednostavljivanja
Koristi se u širokoj fazi detekcije sudara, kao i BSP stablo, u svrhu smanjenja potencijalnih
kolizijskih parova koje treba evaluirati. Algoritam se sastoji od dvije faze - prva je prikazana na slici 3.
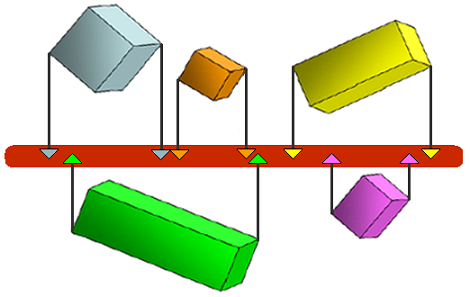
Slika 3. Prva faza algoritma brojenja parova i pojednostavljivanja.
|
Prva faza (faza brojenja parova) počinje projekcijom minimuma i maksimuma omeđujućih volumena (tj. ploha
u slučaju 2D) na sve osi (X, Y, Z u slučaju 3D ili samo X, Y u slučaju 2D). Kako se u ovom radu kao omeđujući
volumeni koriste kugle, koje sve imaju isti radijus, dovoljno je projicirati na svaku os samo središte kružnice.
Zatim se po svim osima projekcije središta sortiraju, te se linearnim algoritmom broje parovi objekata koji se
preklapaju. Tako bi za scenu navedenu na prošloj stranici, te zadanu os dobili sljedeće parove
objekata: (1,4), (2,4), (3,5). Postupak je potrebno ponoviti i za sve ostale osi. Dobiveni parovi pojedine osi
se spremaju u zasebnu listu parova koju ima svaka os.
U drugoj fazi algoritma (fazi pojednostavljivanja) se vrši pojednostavljivanje, tj. dodatna eliminacija parova.
Za to se koristi kvadratna matrica dimenzije jednake broju objekata. Svi elementi te matrice se na početku postave na
nulu, a zatim, kad se po pojedinoj osi detektiraju parovi, u matrici se inkrementira element čiji redak i stupac je
jednak indeksima dvaju objekata koji se po toj osi preklapaju. Pri tome se treba pobrinuti da je indeks prvog elementa
manji od indeksa drugog – tako se zapravo koristi samo gornja trokutasta matrica. Za scenu navedenu na slici 3,
te zadanu os dobili bi matricu prikazanu na slici 4.
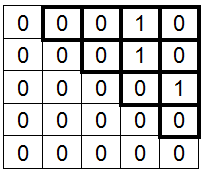
Slika 4. Matrica kolizijskih parova.
|
Postupak treba napraviti za sve osi. Stvarna provjera kolizije se vrši nakon toga, i to za sve elemente
matrice u kojima piše da postoji poklapanje po svim osima (2 za 2D, tj. 3 za 3D). Pri tome se ne čita cijela matrica
već samo parovi one osi koja ima najmanji broj preklapanja (elemenata u listi parova te osi). Prije sljedećeg koraka
simulacije potrebno je sve elemente matrice koji su različiti od nula postaviti na nulu.
<< Uvod | Opis implementacije >>
|