Završni rad br. 38
Robert Sajko
Predizračunati prijenos zračenja
|
U prošlom poglavlju predstavljen je efikasan algoritam
temeljen na postupku isijavanja, gdje je efikasnost postignuta korištenjem
aproksimacijskih, umjesto fizikalno točnih jednadžbi, uvođenjem kompromisa
između broja koraka algoritma i kvalitete rezultata, te razvojem posebnih,
dobro osmišljenih struktura podataka. Ipak, premda je algoritam dovoljno brz za
upotrebu u interaktivnoj grafici na modernim računalima, čak i sa svim
navedenim optimizacijskim mjerama, količina izračunavanja koju je potrebno
izvršiti za svaku pojedinu generiranu sliku jest poprilična. Ukoliko je
generiranje slika jedini zadatak, onda je takvo stanje stvari i prihvatljivo,
no, većina interaktivnih aplikacija čija je svrha predočavanje virtualnih okruženja,
obično sadrže i razne druge komponente, nevezane direktno uz samu grafiku. Odličan
primjer takvih aplikacija su igre, koje predstavljaju jednu od vodećih sila
razvoja računalne grafike, a osim same grafike uključuju i raznovrsne druge
discipline i tehnologije poput umjetne inteligencije, fizikalnih simulacija, baza
podataka, kompleksnih server-klijent arhitektura itd. Također, i raznovrsne
specijalizirane poslovne aplikacije osim samog grafičkog prikaza, obično
uključuju i dodatnu, specifičnu funkcionalnost vezanu uz njihovu primjenu. Sva
ta dodatna funkcionalnost i sama značajno opterećuje računalni sustav, što
znači da treba uzeti u obzir da će u praktičnim primjenama za sam postupak
iscrtavanja biti dostupan tek dio ukupnih računalnih resursa. Ideja koja se
prirodno nameće jest da pokušamo smanjiti količinu posla koji je potrebno
obaviti prilikom samog iscrtavanja, tako da što je više moguće posla obavimo
prije iscrtavanja, u predfazi, koja se može obaviti odvojeno od glavnog
programa. Takva ideja nije nova, te se koristi u interaktivnoj računalnoj
grafici već barem desetljeće, u obliku takozvanih mapa svjetlosti (eng. lightmap). Princip je vrlo jednostavan –
budući su algoritmi poput isijavanja prespori za upotrebu u interaktivnim
aplikacijama, takav se algoritam jednostavno izvrši prije pokretanja same
aplikacije, te se rezultat pohrani u obliku običnih tekstura, nazvanih mape
svjetlosti. Pojedina mapa svjetlosti se sastoji od isključivo sivih tonova,
gdje tami dijelovi odgovaraju sjenama, a svijetli osvjetljenim područjima.
Očito, ovakvim se pristupom mogu dobro simulirati meke sjene i fini prijelazi u
ambijentalnom osvjetljenju, za čiji izračun može poslužiti bilo koji od
globalnih algoritama osvjetljenja. Sve što glavna aplikacija tada mora učiniti,
jest učitati te dodatne teksture i priložiti ih sceni, na isti način kao i sve
obične teksture. Gubitak performansi je u tom slučaju gotovo nezamjetan, no
prisutna su bitna ograničenja. Naime, budući da zasjenjenost pojedinih područja
scene ovisi o geometrijskom odnosu objekata koji sačinjavaju danu scenu, ti
geometrijski odnosi moraju biti poznati prije pokretanja glavne aplikacije. Isto
tako, ukoliko bi došlo do geometrijskih promjena scene (deformacija ili
pomicanje objekata uslijed animacije), predizračunate mape svjetlosti više ne
bi vrijedile, pa bi došlo do vidljivih i očitih artefakata. Osim toga, mape
svjetlosti ovise i o položaju i karakteristikama izvora svjetlosti koji
obasjavaju scenu, tako da nije moguće imati niti dinamička svjetla. Algoritam predizračunatog prijenosa zračenja,
koji će biti opisan u ovom poglavlju, jest konceptualno istovjetan mapama
svjetlosti, no koristi matematički mnogo naprednije metode, te stoga pruža još
kvalitetnije rezultate. Iz tog razloga, bit će ostvariva i dinamička svjetla,
no nažalost, algoritam će i dalje biti ograničen na isključivo geometrijski
statičke scene. Međutim, prije opisa samog algoritma, prisjetimo se na
trenutak jednadžbe iscrtavanja. Kako je već rečeno, upravo integralni član te
jednadžbe predstavlja suštinski problem kojeg računalna grafika pokušava
riješiti. No, može se postaviti naizgled naivno pitanje – budući da su već
razvijeni veoma moćni matematički paketi za simboličke izračune kao što su Wolfram Mathematica ili MATLAB, koji su sposobni riješiti gotovo svaku
zamislivu integralnu jednadžbu, zašto se uopće razvijaju razni algoritmi
iscrtavanja? Zašto ne bismo jednostavno upotrijebili neki od postojećih modela
simboličkog izračunavanja za analitičko rješavanje jednadžbe iscrtavanja?
Upravo u „simboličkom računanju“ leži problem! Naime, da bi se neka jednadžba
mogla simbolički riješiti, mora biti poznat njen oblik i simbolički zapis. U
našem slučaju, to nije moguće. Podintegralna jednadžba je u našem slučaju
definirana karakteristikama scene koju želimo iscrtati, a budući da scene mogu
biti veoma raznolike, s vrlo kompleksnim međuodnosima objekata, eksplicitan
zapis funkcije osvjetljenja će općenito biti prekompleksan za bilo kakvu
praktičnu primjenu. Iz tog razloga, općeniti postupak pronalaženja
eksplicitnog, simboličkog oblika funkcije osvjetljenja ne postoji. Ipak, taj se
postupak može osmisliti i provesti za neke posebne slučajeve, primjerice ako
pretpostavimo da je ambijentalno osvjetljenje savršeno homogeno u svakoj točki
prostora. U tom posebnom slučaju je problem pronalaženja simboličkog zapisa
funkcije osvjetljenja trivijalan, budući da je riječ o tek jednoj konstanti. Upravo
je ova pretpostavka temeljna ideja svih lokalnih modela svjetlosti, dok
globalni algoritmi predstavljaju raznovrsne pristupe numeričkoj aproksimaciji
pravog, analitičkog rješenja jednadžbe iscrtavanja. Svi su ti pristupi
razvijeni dobrim poznavanjem domene računalne grafike, i njoj srodnih
fizikalnih domena. Međutim, danas su u matematici poznate različite općenite
metode numeričkog rješavanja integralnih i diferencijalnih jednadžbi, koje ne
ovise o domeni ili kontekstu primjene. Dakako, neku (odgovarajuću) od tih
općenitih metoda možemo pokušati upotrijebiti i za rješavanje jednadžbe
iscrtavanja. Algoritam predizračunatog prijenosa zračenja se jednim dijelom
temelji na upravo takvoj metodi, koja se naziva Montle Carlo integracija. Osnovna
ideja te metode jest promatranje podintegralne funkcije kao crne kutije, dakle
objekta nepoznatog oblika i interne strukture. Potrebno je poznavati tek skup
točaka koje nastaju funkcijskim preslikavanjem iz odabrane domene, gdje je još
poželjno da ta domena ima određena korisna svojstva. Sam postupak se izvodi iz
teorije vjerojatnosti, stoga je potrebno definirati i objasniti određene
temeljne pojmove koje ćemo koristiti. Osnovni koncept u teoriji vjerojatnosti
jest slučajna varijabla. Ukoliko zamislimo pokus u kojem bacamo novčić, možemo
reći da postoje dva osnovna, međusobno isključiva ishoda – palo je pismo, i
pala je glava. Ti ishodi se nazivaju elementarni događaji, a svi postojeći
elementarni događaji tvore prostor događaja. Slučajnu varijablu tada možemo
definirati kao funkciju čija je domena prostor događaja, a koja preslikava
elementarne događaje u realne brojeve. Na primjeru bacanja novčića, možemo
definirati slučajnu varijablu X na sljedeći način:
Zatim možemo definirati i zakon razdiobe te slučajne
varijable, koji govori kolika je vjerojatnost da varijabla poprimi neku
specifičnu vrijednost. U gornjem primjeru, zakon razdiobe bi izgledao ovako:
U gornjem retku se nalaze sve moguće vrijednosti koje
varijabla može poprimiti, a u donjem retku su redom zapisane odgovarajuće
vjerojatnosti tih vrijednosti. Ovako definirana slučajna varijabla se naziva
diskretnom varijablom, budući da postoji konačan skup vrijednosti koje može
poprimiti, koje odgovaraju konačnom broju događaja. Međutim, nama će biti
zanimljivije kontinuirane varijable, koje se definiraju nad beskonačnim prostorom
događaja, i koje mogu poprimiti beskonačan broj vrijednosti. Kontinuirana
slučajna varijabla se primjerice može definirati za pokus u kojem nasumično biramo
broj iz intervala [0, 1]. Budući da za realne brojeve vrijedi da u svakom
intervalu postoji beskonačan broj različitih brojeva, tako i slučajna varijabla
može poprimiti beskonačan broj različitih vrijednosti. Slično kao što se za
diskretne varijable definira zakon razdiobe, tako se za kontinuirane varijable
definira funkcija razdiobe:
Naime, budući da je domena beskonačna, općenito će nas
zanimati samo vjerojatnost da je varijabla poprimila vrijednost manju od neke
zadane, a ne točan iznos. Još jedan izrazito važan pojam vezan uz kontinuirane
slučajne varijable jest funkcija gustoće, koja se definira kao derivacija
funkcije razdiobe. Drugim riječima, vrijedi sljedeće:
gdje je g(t)
funkcija gustoće. Važno svojstvo funkcije gustoće jest da njen integral po
cijelom skupu realnih brojeva mora biti jednak jedan. Također, vrijedi da za
svaku slučajnu varijablu postoji neka vrijednost koju ta varijabla najčešće
poprima, a ta se vrijednost naziva očekivanje varijable. Očekivanje možemo
definirati na sljedeći način:
Budući da su i same slučajne varijable ništa drugo doli
funkcije s određenim svojstvima, možemo proširiti gornju definiciju očekivanja
na općenite funkcije:
No, očekivanje neke funkcije se može (približno)
izračunati i na drugi način, na temelju Zakona velikih brojeva. Taj zakon kaže
da ukoliko su poznate vrijednosti funkcije za velik broj različitih točaka,
tada je očekivanje te funkcije približno jednako aritmetičkoj sredini svih
poznatih uzoraka. Matematički, taj rezultat možemo zapisati ovako:
Bitna napomena jest da ovaj zakon vrijedi samo ukoliko su
uzorci nasumično, uniformno distribuirani. Dakako, što je veći broj uzoraka, to
će rezultat biti točniji. Prethodne dvije relacije sada možemo izjednačiti, te
time dobivamo sljedeći rezultat:
Kao što vidimo, integral neke proizvoljne funkcije f(x) možemo aproksimirati aritmetičkom
sredinom slučajnih uzoraka te funkcije, skaliranih nekim težinskim faktorom
(koji odgovara vrijednosti funkcije gustoće). Upravo opisani postupak se naziva
Monte Carlo integracija. Sad je očito kako se može integrirati funkcija čiji
eksplicitan oblik nije poznat – korištenjem ove numeričke metode, dovoljno je
poznavati tek određen skup točaka funkcije čiji integral tražimo. Da bismo
mogli upotrijebiti ovu metodu za rješavanje jednadžbe iscrtavanja, potrebno je
još samo odgovoriti na dva pitanja. Naime, budući da je jednadžba koju
rješavamo definirana kao integral preko površine kugle, postavlja se pitanje
kako uniformno raspodijeliti uzorke preko sfere. Također, moramo pronaći i
težinske faktore, odnosno odgovarajuću funkciju gustoće. Prvi problem ćemo lako
riješiti korištenjem takozvane kanonske uniformne varijable, koja poprima
vrijedosti u intervalu [0, 1), i to tako da svaka vrijednost ima jednaku
vjerojatnost pojavljivanja. Ukoliko uzmemo da kanonske varijable X i Y
označavaju pravokutne koordinate točaka, možemo ih projicirati na površinu
sfere pomoću sljedeće transformacije:
Budući da uzorke biramo uniformno, funkcija razdiobe je
takva da je njen iznos proporcionalan duljini intervala u kojem se uzorak
nalazi. Naime, pošto je funkcija razdiobe definirana kao P(X < x), što je x
veći, to je širi interval u kojem se X
može nalaziti, a to znači i da je veća vjerojatnost da će se X nalaziti u tom intervalu. Drugim
riječima, u našem slučaju funkcija razdiobe jest linearna, a ukoliko se
prisjetimo da je funkcija gustoće definirana kao derivacija funkcije razdiobe,
lako zaključujemo da funkcija gustoće mora biti tek jedna konstanta. Iz uvjeta
da integral funkcije gustoće mora biti jedan, lako dobivamo da je njen iznos
jednak recipročnoj vrijednosti oplošja kugle, a pošto radimo s jediničnom
kuglom, ta je vrijednost jednaka 1/4π. Sad napokon možemo napisati konačan
izraz za numeričku aproksimaciju integrala, koji možemo direktno upotrijebiti
za rješavanje jednadžbe iscrtavanja:
Doista, naprednim matematičkim aparatom uspjeli smo
prevesti jednadžbu iscrtavanja iz oblika koji je nerješiv direktno na računalu,
u oblik koji to jest, korištenjem isključivo jednostavnih operacija množenja i
zbrajanja. Budući da direktno rješavamo jednadžbu iscrtavanja, sasvim sigurno
ćemo obuhvatiti apsolutno sve optičke efekte koje svjetlost proizvodi svojom
propagacijom (dakako, ne uzimajući u obzir pojave zbog valne prirode svjetlosti,
koje jednadžba iscrtavanja ne opisuje). Međutim, ako malo bolje pogledamo
gornji izraz, i sjetimo se da ćemo ga morati izračunavati za svaki vrh svih
poligona koji sačinjavaju scenu, vidimo da je tu uključeno doista mnogo
računanja. Ukoliko pretpostavimo da se na sceni nalazi stotinu tisuća vrhova
(što je uobičajeno za današnje standarde), te da koristimo deset tisuća
slučajnih uzoraka, dolazimo do brojke od jedne milijarde operacija množenja i
zbrajanja po slici, za cjelokupnu scenu. Dakako, sama ta evaluacija integrala
se može provesti tek nakon što su poznati uzorci funkcije osvjetljenja, a da bi
oni bili izračunati, potrebno je odrediti karakteristike scene, dakle
geometrijske međuodnose objekata na sceni. Algoritam koji efikasno rješava taj
problem jest praćenje zrake, koji je i sam po sebi još uvijek vrlo zahtjevan za
većinu osobnih računala. Doduše, to određivanje međuodnosa objekata na sceni se
može provesti kao predprocesiranje scene, ukoliko koristimo statičku
geometriju, takvu da se objekti ne pomiču niti deformiraju za cjelokupno
trajanje simulacije. Dakle, u predfazi algoritma iscrtavanja, a po potrebi čak
i nekom aplikacijom odvojenom od glavnog programa, može se provesti algoritam
praćenja zrake i na temelju toga generirati potrebni uzorci. No, još uvijek
ostaje problem evaluacije same jednadžbe iscrtavanja, što je postupak koji se
za detaljne scene može sastojati, kako smo prethodno utvrdili, i od milijarde
operacija! Očito, opisani postupak je praktički neupotrebljiv, no razlog tomu
je što je algoritam u predstavljenom obliku još uvijek nepotpun. U ovom
trenutku možemo uvesti još jednu matematičku tehniku koja se često koristi za
rješavanje raznih fizikalnih i drugih problema, a koja će na vrlo elegantan
način drastično reducirati broj potrebnih operacija za vrijeme samog
iscrtavanja. Riječ je o rastavljanju proizvoljnih funkcija u takozvane bazne
funkcije, za što se obično odabiru neki jednostavni polinomi ili
trigonometrijske funkcije. Ideja je zatim sljedeća: odgovarajućim skaliranjem i
zbrajanjem nekog broja tih baznih funkcija se dobiva bolja ili lošija
aproksimacija početne funkcije. Ukoliko označimo početnu funkciju sa f(x), i-tu baznu funkciju sa Bi(x),
a koeficijent za skaliranje i-te
bazne funkcije sa ci, onda
prethodnu rečenicu možemo matematički zapisati ovako:
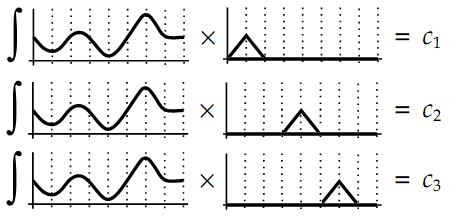
Jedini problem koji moramo riješiti jednom kad smo
odabrali bazne funkcije, jest odrediti odgovarajuće koeficijente za danu
početnu funkciju, koji govore koliko je ta funkcija „slična“ pojedinim baznim
funkcijama. Postupak njihovog izračunavanja se svodi na integriranje umnoška
početne funkcije i neke bazne funkcije, po cijeloj domeni početne funkcije,
dakle:
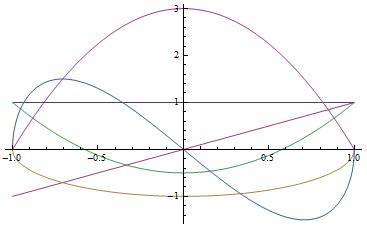
Možda je najjednostavnije predočiti si ovaj postupak grafički.
Zamislimo da imamo neku krivuljnu početnu funkciju, i tri linearne bazne
funkcije. Postupak određivanja koeficijenata bi tada izgledao ovako:
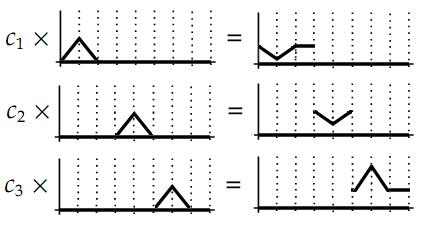
Jednom kad imamo izračunate koeficijente, možemo ih
pomnožiti s baznim funkcijama, i time skalirati bazne funkcije na potrebnu
amplitudu:
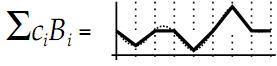
Nakon toga, skalirane bazne funkcije trebamo samo
zbrojiti, i dobit ćemo aproksimaciju početne funkcije:
Sam postupak rastavljanja proizvoljne funkcije u sumu
baznih funkcija se naziva projekcija, a pojedini članovi te sume se ponekad
nazivaju harmonicima. Odabir vrste projekcije (odnosno, oblika baznih funkcija)
ovisi o kontekstu primjene i svojstvima funkcije koju želimo aproksimirati. U
našem slučaju, budući da je funkcija osvjetljenja definirana preko sfere, odgovarat
će nam projekcija u takozvane sferne harmonike. Ova vrsta projekcije se zasniva
na određenom obliku polinoma, koji se nazivaju asocirani Legendre polinomi. Ti
polinomi se definiraju pomoću dvaju parametara, l i m, te je njihova
uobičajena oznaka
Asocirani Legendre polinomi se definiraju kao rješenja
istoimene diferencijalne jednadžbe, no postoje drugi načini kako se oni mogu
generirati. Najjednostavniji način, koji je ujedno i najprimjereniji za
implementaciju na računalu, jest korištenje rekurzivnih relacija. Osnovna takva
relacija jest sljedeća:
Primjetimo da je parametar m konstantan, te da se mijenja isključivo parametar l. To znači da ovom relacijom možemo iz
poznavanja dvaju polinoma s istim rednim brojem, ali iz dvaju susjednih pojasa,
izračunati treći polinom, koji će se nalaziti u trećem pojasu po redu (počevši
od pojasa prvog polinoma), i imati isti redni broj unutar svog pojasa kao i
početna dva polinoma. No, osim ove temeljne relacije, može se izvesti i
pomoćna, nešto jednostavnija relacija:
Ova
relacija vrijedi samo u slučaju da poznajemo polinom čiji je redni broj unutar
pojasa jednak rednom broju pojasa. Tada možemo jednostavno podignuti taj
polinom u sljedeći pojas. Osim ovih rekurzivnih relacija, za asocirane Legendre
polinome vrijedi i sljedeće zanimljivo svojstvo:
Riječima, ovo svojstvo znači da se polinom čiji je redni
broj unutar pojasa jednak rednom broju samog pojasa može dobiti pomoću direktne
formule, bez potrebe za postepenim, iterativnim računanjem jednog po jednog
polinoma. U gornjoj formuli se javlja operator !!, što je oznaka dvostrukog
faktorijela, a koji je definiran na sljedeći način:
Promatranjem gornjih triju relacija, lako možemo osmisliti
efikasan način za generiranje asociranih Legendre polinoma proizvoljnih
parametara l i m. Očito, najjednostavnije je evaluirati posljednju relaciju, koja
pruža direktno rješenje. Doduše, ona se sastoji od dvostrukog faktorijela koji
je i sam rekurzivna relacija, no vremenska kompleksnost računanja faktorijela
se može svesti na konstantu upotrebom tablice predizračunatih vrijednosti.
Dakle, ideja je sljedeća: za zadane parametre l i m, prvo se izračuna intermedijarni
polinom korištenjem relacije (3). Rezultirajući polinom će biti oblika
gdje je
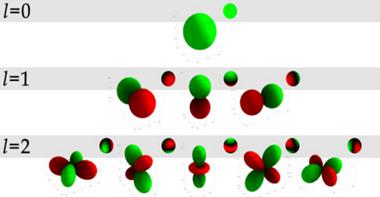
Valja primjetiti da je za uvođenje sfernih harmonika potrebno
malo proširiti prethodnu definiciju asociranih Legendre polinoma. Naime, rekli
smo da mora vrijediti l ≤ 0, 0 ≤
m ≤ l. Međutim, za funkcije
sfernih harmonika, potrebno je proširiti dozvoljeni interval parametra m tako da uključuje i negativne
vrijednosti, dakle da vrijedi –l ≤
m ≤ l. Za ilustraciju, funkcije sfernih harmonika prvih triju pojaseva
izgledaju ovako u općem obliku:
Kako je već rečeno, općeniti postupak za projekciju neke početne
funkcije u bazne funkcije jest izračun odgovarajućih koeficijenata, a koji se
računaju kao integral umnoška početne funkcije i baznih funkcija. U našem
konkretnom primjeru, može se izvesti sljedeća formula za dobivanje pojedinih koeficijenata:
Međutim, funkciju koju ćemo htjeti projicirati – funkciju
osvjetljenja – nije moguće, kako smo već utvrdili, zapisati u eksplicitnom,
simboličkom obliku, već je moguće samo procijeniti njenu vrijednost u nekom
skupu točaka, korištenjem algoritma praćenja zrake ili nekog sličnog. No, vidimo
da smo upravo taj problem već riješili, uvođenjem Monte Carlo integracije!
Ukoliko se prisjetimo prethodno dobivenog rezultata za numeričku aproksimaciju
integrala,
možemo povezati taj rezultat sa formulom za koeficijente projekcije,
pa dobivamo sljedeće:
Prebacivanjem u pravokutne koordinate, dobivamo konačni
oblik formule, koji je najprimjereniji za implementaciju na računalu:
gdje je
U ovom trenutku možemo opisati neka bitna svojstva sfernih
harmonika, koja ih čine idealnim izborom baznih funkcija za projekciju funkcije
osvjetljenja. Osnovno svojstvo, koje predstavlja i glavni razlog upotrebe
upravo sfernih harmonika, jest ortonormalnost. Za neki skup funkcija se kaže da
je ortonormalan ukoliko za svaki par funkcija tog skupa vrijedi da je integral umnoška tih dviju
funkcija jednak ili 0 ili 1. U slučaju da su funkcije istovjetne, rezultat je
1, a u suprotnom slučaju 0. Matematički, ovo možemo zapisati na sljedeći način:
Bitnost ovog svojstva možemo uočiti ukoliko se prisjetimo
jednadžbe iscrtavanja:
Radi jasnoće, njen integralni član možemo sažeto zapisati
u sljedećem obliku:
gdje je L(s) funkcija upadne svjetlosti, što
odgovara izrazu
Ukoliko
upotrijebimo definiciju projekcije, gornje podintegralne funkcije možemo ovako
zapisati:
Oznake
Raspišimo
sad ove dvije dvostruke sume za prvih nekoliko članova:
Nakon
množenja tih izraza, dobivamo:
Dakle,
imamo sumu umnožaka koeficijenata i sfernih harmonika obaju projekcija, što
možemo sažeto zapisati:
Budući da su integracija i sumacija linearni operatori,
možemo im promijeniti redosljed:
Prema svojstvu ortonormalnosti, slijedi da će integral na
desnoj strani jednadžbe uvijek biti jednak jedinici za m = m', l = l', i jednak nuli za sve druge slučajeve, pa možemo
izbaciti unutarnje dvije sumacije i dobiti ovaj mnogo jednostavniji izraz:
Ako bolje pogledamo što smo dobili, vidimo da smo uspjeli
svesti integral preko površine sfere na jednostavno množenje i zbrajanje
koeficijenata! Dakako, istu stvar smo postigli i direktnim numeričkim
rješavanjem jednadžbe iscrtavanja, no postoji značajna razlika u efikasnosti. Kod
direktnog rješavanja jednadžbe, za svaki vrh poligona koji sačinjavaju scenu potrebno
je ponoviti jedno množenje i jedno zbrajanje onoliko puta koliko imamo uzoraka,
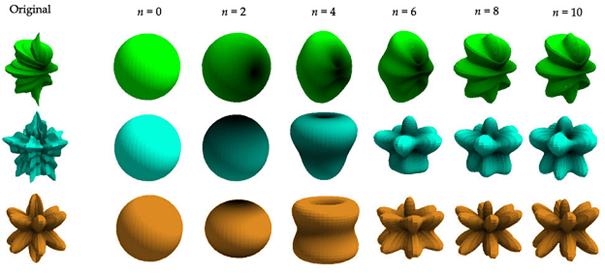
što u praktičnim primjenama može biti i desetak tisuća. S druge strane, ukoliko
provedemo projekciju u sferne harmonike, pokazat će se da je i 16 koeficijenata
po vrhu sasvim dovoljno za kvalitetne rezultate, što znači da je dovoljno tek
16 operacija množenja i zbrajanja po vrhu. Drugim riječima, algoritam je sada
doslovno postao tisuću puta brži! Sferni harmonici posjeduju još jedno izrazito korisno
svojstvo, a to je rotacijska invarijantnost. Naime, zamislimo da imamo dvije
funkcije, f i g. Funkciju f projiciramo
u sferne harmonike, a zatim izvršimo rotaciju za neki kut oko neke osi. S druge
strane, funkciju g prvo rotiramo za
isti taj kut oko iste te osi, a zatim projiciramo. Ukoliko su f i g
istovjetne funkcije, onda će i rezultati oba postupka biti istovjetni. Drugim
riječima, svejedno je da li prvo rotiramo funkciju pa ju projiciramo, ili prvo
projiciramo pa rotiramo. Ovo odlično svojstvo će omogućiti dinamička svjetla,
budući da ćemo funkciju upadnog svjetla, u gornjim jednadžbama označenu s L(s), moći rotirati i nakon projekcije. Sama
rotacija koeficijenata se jednostavno postiže matričnim množenjem, a jedini je
problem konstruirati odgovarajuću matricu. Naime, dimenzije rotacijske matrice
očito ovise o broju koeficijenata s kojima računamo, a budući da broj potrebnih
koeficijenata ovisi o redu sferne projekcije (za projekciju n-tog reda potrebno je n2 koeficijenata), i
dimenzije rotacijske matrice također ovise o redu projekcije. To znači da je
potrebno pronaći način za generiranje rotacijskih matrica danog reda. Može se
pokazati da će za n-ti red
projekcije, rotacijska matrica biti dimenzija n2× n2,
te se može izgraditi pomoću rekurzivnog postupka. Pritom ćemo pretpostaviti da
se rotacija vrši pomoću Eulerovih kuteva, dakle, kao niz od tri rotacije oko
koordinatnih osi, pri čemu je potrebno odabrati redosljed komponenti rotacije. Najpovoljniji
izbor redosljeda rotacija jest oko ZYZ osi. Naime, tada da su nam dovoljne samo
dvije vrste rotacija, oko Z osi , i oko Y osi, pri čemu se rotacija oko Y osi
može dodatno rastaviti na rotaciju oko X osi za 90 stupnjeva, zatim rotaciju
oko Z osi, te rotaciju oko X osi za -90 stupnjeva. Dakle, izraz za konačnu
matricu rotacije sfernih harmonika glasi:
Dakako, još moramo odrediti i same matrice X i Z. Jedan
način kako se to može postići jest upotrebom istog principa koji omogućuje
projekciju neke krivulje u bazne funkcije. Naime, prisjetimo se značenja koeficijenata
baznih funkcija – oni preslikavaju bazne funkcije u segmente početne krivulje! Prema
tome, možemo istu tehniku koristiti za
preslikavanje ne-rotiranih koeficijenata u rotirane. Pojedini koeficijenti ove
projekcije se dobivaju na potpuno isti način koji vrijedi za sve projekcije,
dakle integracijom umnoška početne i bazne funkcije, što u našem slučaju daje:
gdje su
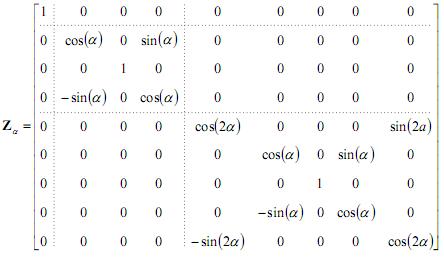
Odmah uočavamo vrlo zanimljivu pojavu – elementi matrice
koji odgovaraju pojedinim pojasevima su odvojeni, i ne utječu jedan na drugoga.
Također, nulti pojas se sastoji samo od jedne jedinice, dok se prvi pojas
sastoji od jedinice oko koje su raspoređeni sinusi i kosinusi. Nadalje, drugi
pojas se sastoji od elemenata nultog pojasa (jedinice u sredini), elemenata
prvog pojasa (sinusa i kosinusa raspoređenih oko jedinice u sredini), te sinusa
i kosinusa dvostrukog kuta, koji su opet raspoređeni istim redosljedom oko
elemenata prethodnih pojaseva. Doista, matematičkom indukcijom se može dokazati
da se svaki sljedeći pojas sastoji od svih elemenata prethodnih pojaseva, te
dodatnih sinusa i kosinusa kuta Nα.
Također, i matrica rotacije oko X osi se može izgraditi na analogan način.
Ovime smo pronašli jednostavan i efikasan rekurzivan postupak za generiranje
rotacijskih matrica, koji se lako može implementirati na računalu. Na kraju, nakon upoznavanja potrebne matematičke pozadine,
možemo rezimirati glavne korake algoritma predizračunatog prijenosa zračenja.
Predfaza se sastoji od sljedećih koraka:
Jednom kad je predprocesiranje scene dovršeno, može
započeti samo iscrtavanje, koje se sastoji od sljedećih koraka:
|